
准备为了使用WiFi,主微控制器必须使用出厂固件进行编程,无线电模块必须使用专用固件(而不是出厂固件)进行编程,下载WIFI固件。有关主微控制器,请参阅主微控制器epuck2机器人(STM32)固件更新。用脚本烧录无线电模块WiFi固件(25.02.19),有关如何更新固件的信息,请参阅ESP32无线(WIFI蓝牙)固件更新将机器人选择器档位放在位置15(F)。WiFi通道用于与机器人进行比蓝牙更快的通信。此刻 QQVGA (160x120) 彩色图像连同大约10 Hz的传感...
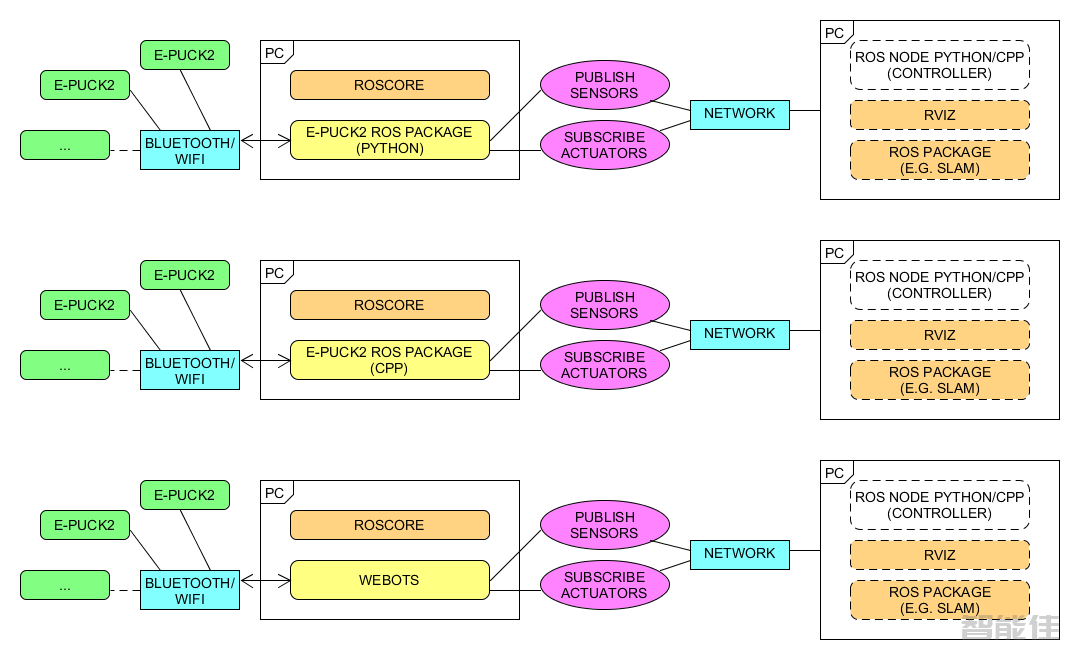
本章介绍如何通过蓝牙或WiFi将ROS与e-puck2机器人一起使用,将它们连接到运行ROS节点的计算机。基本上所有的传感器都暴露在ROS中,您也可以通过ROS将命令发送回机器人。Pyhton和cpp版本都被实现,以使用户可以选择其首选的编程语言。这是一个通用架构:基于WIFI的ROS功能包:git clone -b e-puck2_wifi https://github.com/gctronic/epuck_driver_cpp安装依赖:gmapping(SLAM)包:su...
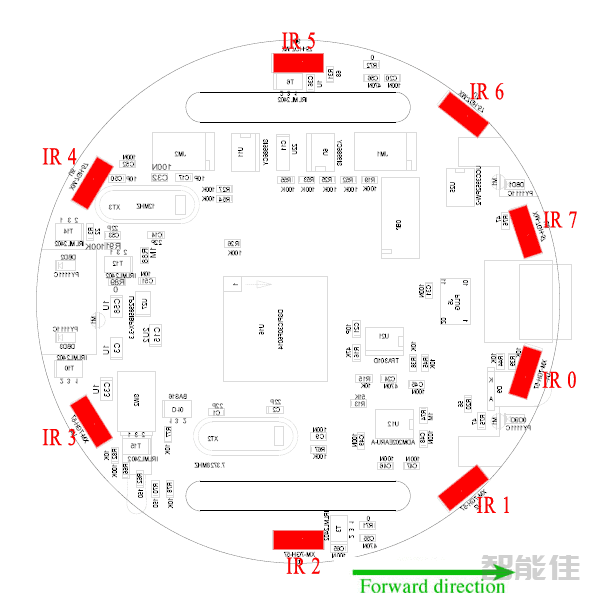
E-puck2机器人配备了8个红外接近传感器(用于测量环境光和4厘米以下物体的接近度),位置如下图所示:下图是机器人开始靠墙后退时IR0(前传感器)的原始数据采集。X轴显示距墙的距离的步数。1000步对应12.8厘米。...