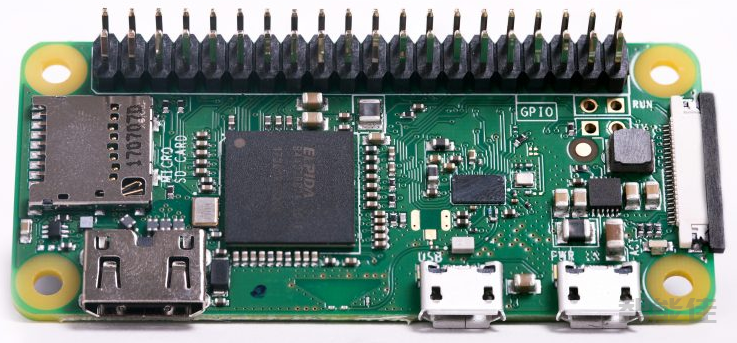
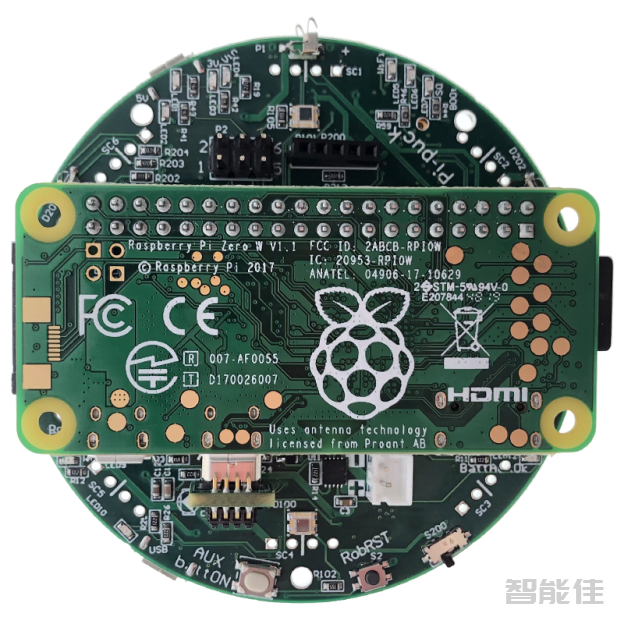
一个新的E-puck2机器人平台的具有树莓派接口的控制器。SP-puck是E-puck2的扩展,允许在机器人上安装Raspberry Pi Zero W单板计算机,并在Pi-puck的原有基础上在增加了光电接收、射频通信和进一步扩展的可能性。也可与Raspberry Pi Zero WH(内置WIFI、蓝牙,包含排针)、Raspberry Pi Zero(无内置WIFI、蓝牙)或其他Raspberry Pi兼容板兼容。...
Sp-puck处理器STM32F103CBU6/32-bit ARM Cortex®-M3Raspberry Pi Zero W传感器光电接收传感器(x2)相机支持树莓派相机编程ARM Cortex 5pin JTAG/SWD connector串口数字IO37个LEDRGB LED(x2)WIFI充电 按键电源按键复位按键麦克风数字麦克风扬声器扬声器通信接口射频通信供电支持扩展电源充电支持USB充电存储16G USB可支持USB鼠标、键盘...
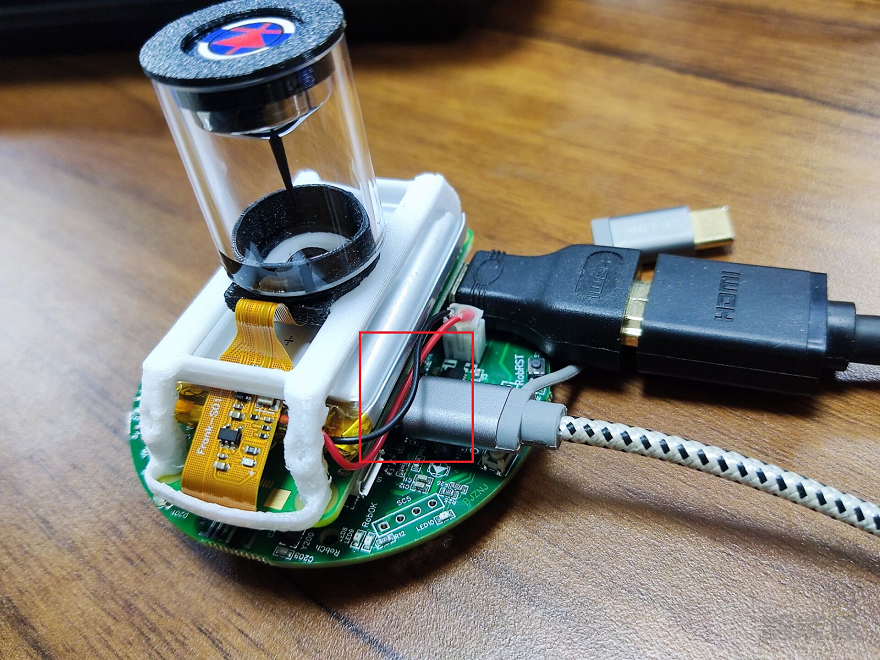
在大多数情况下,Sp-puck扩展需要连接到Epuck2机器人的扩展接口上来进行一起使用,当不需要与机器人交互时,它也可以单独使用。必须使用固件e-puck2_main-processor_extension.elf(07.06.19)对e-puck2机器人进行编程,并且选择器必须位于位置A。下面各节均以完整配置(机器人+Sp-puck扩展)进行说明。设备连接1使用Mini HDMI转HDMI的转接头,连接带有HDMI的显示器2使用Micor USB 转AUX转换线连接树莓派...