
ToddlerBot: 开源仿人机器人平台——低成本、高灵活性的AI学习与操作专家微信公众号文章链接跳转:https://mp.weixin.qq.com/s/6trQtVq4K8USg1XC-Fl6pAToddlerBot是一个开源的、与机器学习兼容的仿人机器人平台,旨在高效地在模拟环境和现实世界中收集大规模、高质量的训练数据。该平台由斯坦福大学的设计团队开发,具备30个自由度(DoFs),支持多种控制策略,如强化学习、模仿学习等,适用于广泛的研究和应用场景。产品亮点低成本...
/
2768 次浏览/
人形机器人

Orca Core 是 ORCA Hand 的核心控制包。它用于抽象硬件,提供校准和张紧脚本,并在关节空间中使用简单的高级控制方法来控制机械手。采购链接开始要开始使用 Orca Core,请按照以下步骤操作:下载代码:git clone https://ghfast.top/https://github.com/orcahand/orca_core.git 1.创建虚拟环境(推荐):python3 -m venv venvsource venv/bin/a...
/
2121 次浏览/
灵巧手

智能佳—Gello-UR机械臂遥操作—操作引导视频/* 仅针对本页面的局部样式,不影响全局 */
.product-video-container {
max-width: 100%;
margin: 20px 0;
background: #fff;
border-radius: 4px;
overflow: hidden;...

点击跳转项目地址:https://wuphilipp.github.io/gello_site/代码地址:https://github.com/wuphilipp/gello_software...

采购点击跳转:项目网站:https://jasonjzliu.com/factr/代码开源地址:https://github.com/JasonJZLiu/FACTR_Teleop...
RB-88 是用于 OLLO Spark 和 OLLO Excel Kit 的控制器,具有蓝牙功能及内置设备,如电机输出轴和各种输入/输出设备(红外传感器、麦克风、LED、蜂鸣器)。RB-88 控制器兼容 ROBOTIS 的 12mm 标准产品。固件更新和恢复可通过 STEAMCUP 应用完成。您可以使用 R-Block 对 RB-88 进行编程,并将程序下载到控制器上运行。...
/
225 次浏览/
机器人配件
Jetson Nano B01 SUB板是默认的eMMC启动,而不是像之前的NVIDIA官方套件一样从SD卡启动。目前Jetson Nano B01 eMMC只有16G,对于大部分需要安装CUDA, tensorflow等资源的用户来说,16G的内容还是太小了。这里针对扩展SD卡提供设置说明。...
/
1675 次浏览/
机器人配件
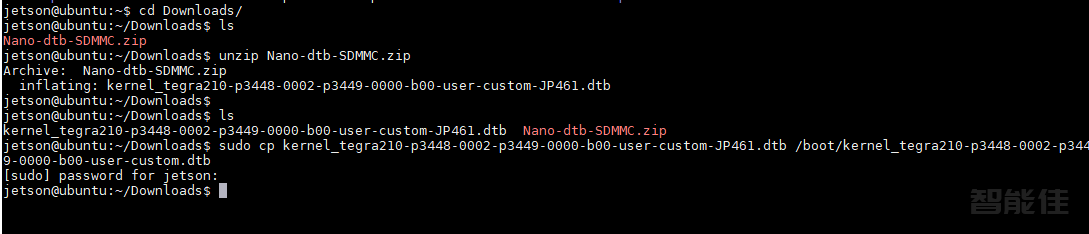
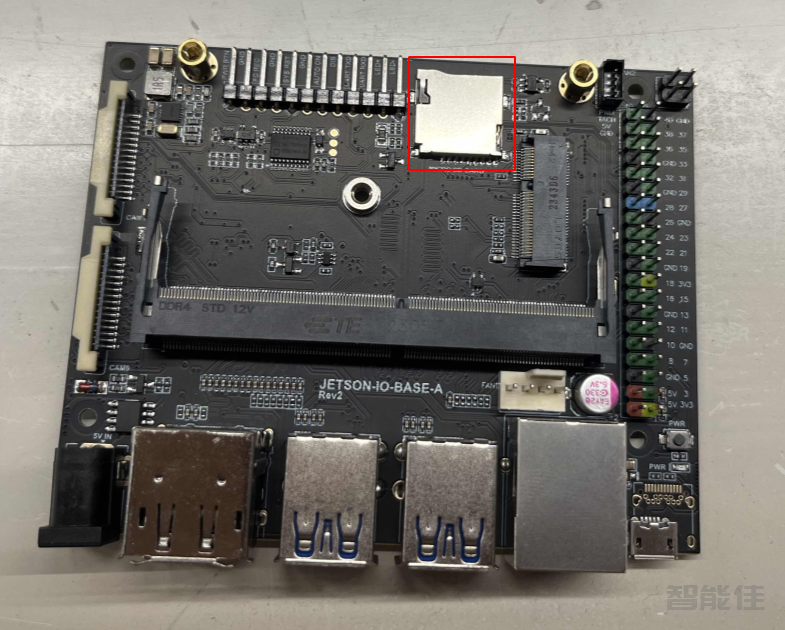
请先确保Jetson Nano B01是可以正常进入EMMC系统的。为了正常运行,请注意检查不要写错字符,或者改错位置。否则需要从头来过。1.将sd卡插入Jetson Nano B01板子2.启动Jetson Nano B01,打开终端3.下载dtb文件到Jetson Nano B01并解压,dtb文件可以从此处获取或者用如下指令下载cd ~/Downloadswget http://rosrobot.cn/zb_users/upload/software/tb3/Nano-...
/
2274 次浏览/
机器人配件
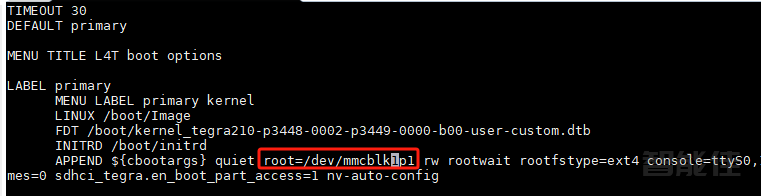
SD卡已经预先烧好nano的系统了。(建议JetPack4.5.1版本以上)修改emmc系统里的extlinux.conf文件,sudo vim /boot/extlinux/extlinux.conf找到语句APPEND ${cbootargs} quiet root=/dev/mmcblk0p1 rw rootwait rootfstype=ext4 console=ttyS0,115200n8 console=tty0将mmclk0p1改成mmclk1p1,...
/
1788 次浏览/
机器人配件
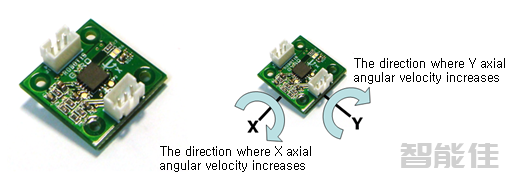
陀螺仪传感器GS-12介绍测量角速度。计算机器人的哪一侧倾斜或获得更多动力。保持机器人的平衡并可用于其他运动应用。 规格重量:2.8克尺寸:23毫米×23毫米×10毫米工作温度:-40℃~85℃角速度计算范围:-300°/s~300°/s带宽:140Hz灵敏度:3.33mV/dps推荐电源电压:4.5~5.5V 引脚排列X轴管脚定义1.ADC:将角速度输出为模拟信号。2.接地3.电源电压(5V) Y轴管脚定义4.电源电压(5V)5.接地6.ADC...
/
1453 次浏览/
机器人配件

OpenMV Cam 是一款小型、低功耗的微控制器板,可让您在现实世界中使用机器视觉轻松实现应用程序。您可以使用高级 Python 脚本(由 MicroPython 操作系统提供 )而不是 C/C++ 对 OpenMV Cam 进行编程。这使得处理机器视觉算法的复杂输出和使用高级数据结构变得更加容易。但是,您仍然可以在 Python 中完全控制 OpenMV Cam 及其 I/O 引脚。您可以轻松触发外部事件拍照和视频,或执行机器视觉算法来找出如何控制 I/O 引脚。...
/
2088 次浏览/
机器人配件