
ToddlerBot: 开源仿人机器人平台——低成本、高灵活性的AI学习与操作专家微信公众号文章链接跳转:https://mp.weixin.qq.com/s/6trQtVq4K8USg1XC-Fl6pAToddlerBot是一个开源的、与机器学习兼容的仿人机器人平台,旨在高效地在模拟环境和现实世界中收集大规模、高质量的训练数据。该平台由斯坦福大学的设计团队开发,具备30个自由度(DoFs),支持多种控制策略,如强化学习、模仿学习等,适用于广泛的研究和应用场景。产品亮点低成本...
/
2753 次浏览/
人形机器人

Orca Core 是 ORCA Hand 的核心控制包。它用于抽象硬件,提供校准和张紧脚本,并在关节空间中使用简单的高级控制方法来控制机械手。采购链接开始要开始使用 Orca Core,请按照以下步骤操作:下载代码:git clone https://ghfast.top/https://github.com/orcahand/orca_core.git 1.创建虚拟环境(推荐):python3 -m venv venvsource venv/bin/a...
/
2102 次浏览/
灵巧手

智能佳—Gello-UR机械臂遥操作—操作引导视频/* 仅针对本页面的局部样式,不影响全局 */
.product-video-container {
max-width: 100%;
margin: 20px 0;
background: #fff;
border-radius: 4px;
overflow: hidden;...

点击跳转项目地址:https://wuphilipp.github.io/gello_site/代码地址:https://github.com/wuphilipp/gello_software...

采购点击跳转:项目网站:https://jasonjzliu.com/factr/代码开源地址:https://github.com/JasonJZLiu/FACTR_Teleop...

TurtleBot3 Burger是一款开源移动机器人平台,采用树莓派4B作为主处理器,配备A2M12激光雷达,支持SLAM建图和自主导航功能。...
树莓派4B 处理器:Broadcom BCM2711,四核Cortex-A72 @ 1.5GHz 内存:4GB LPDDR4 接口:2个HDMI接口、4个USB接口、千兆以太网口、GPIO接口 存储:通过MicroSD卡扩展A2M12激光雷达 检测范...
硬件连接所需设备: TurtleBot3 Burger机器人 HDMI显示器 USB键盘和鼠标 电源适配器连接步骤: 1.使用HDMI线连接树莓派4B的HDMI接口与显示器 2.将USB键盘和鼠标连接到树莓派的USB接口 ...
连接WiFi网络图形界面方式:点击桌面右上角网络图标选择要连接的WiFi网络输入WiFi密码等待连接成功配置ROS网络通信获取IP地址:# 在机器人端执行ifconfig# 记录wlan0或eth0的IP地址,如:192.168.1.100配置环境变量:编辑~/.bashrc文件:nano ~/.bashrc# 添加以下内容export TURTLEBOT3_MODEL=burger
export ROS_MASTER_URI=http://&...

打开机器人电源开关...
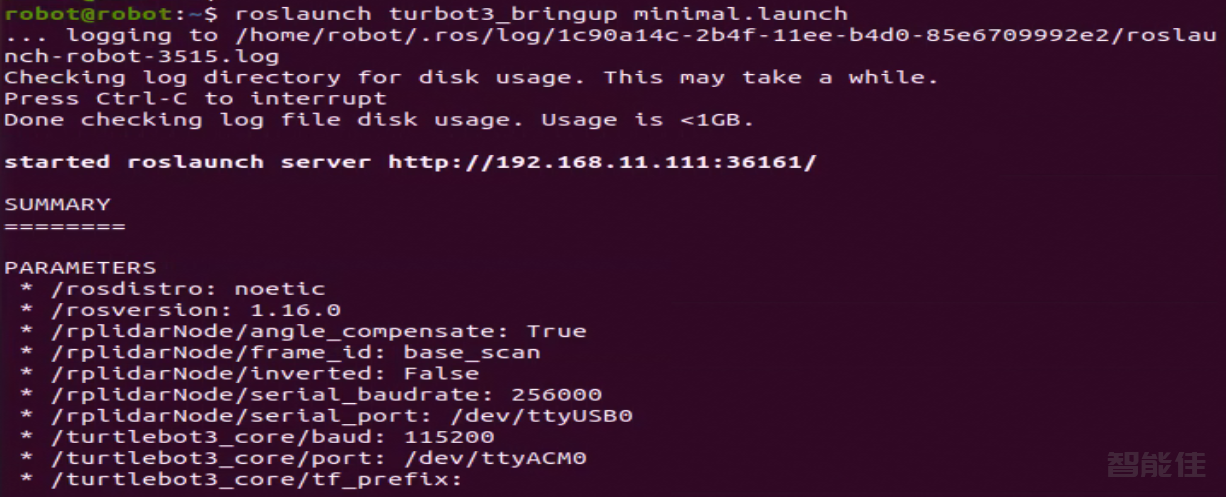
1)[Remote PC] 启动roscoreroscore2)[TurtleBot3] 启动TurtleBot3roslaunch turbot3_bringup minimal.launch...
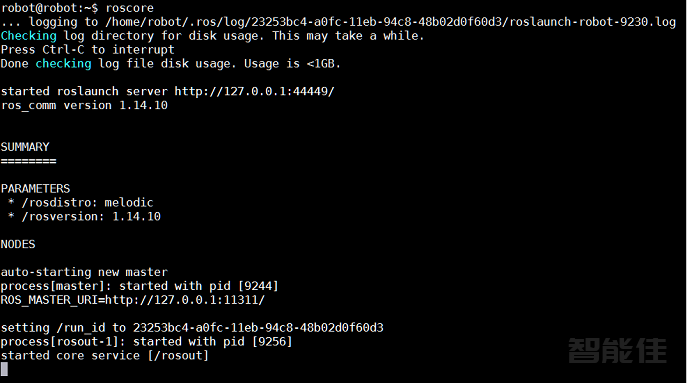
1)[Remote PC] 启动roscoreroscore2)[TurtleBot3] 启动TurtleBot3roslaunch turbot3_bringup minimal.launch3)[Remote PC] 启动进行简单远程操作测试roslaunch turbot3_teleop keyboard.launch4)[Remote PC] 如果文件成功启动,终端将显示以下内容。注意:w是增加线速度 x是降低线速度a是...
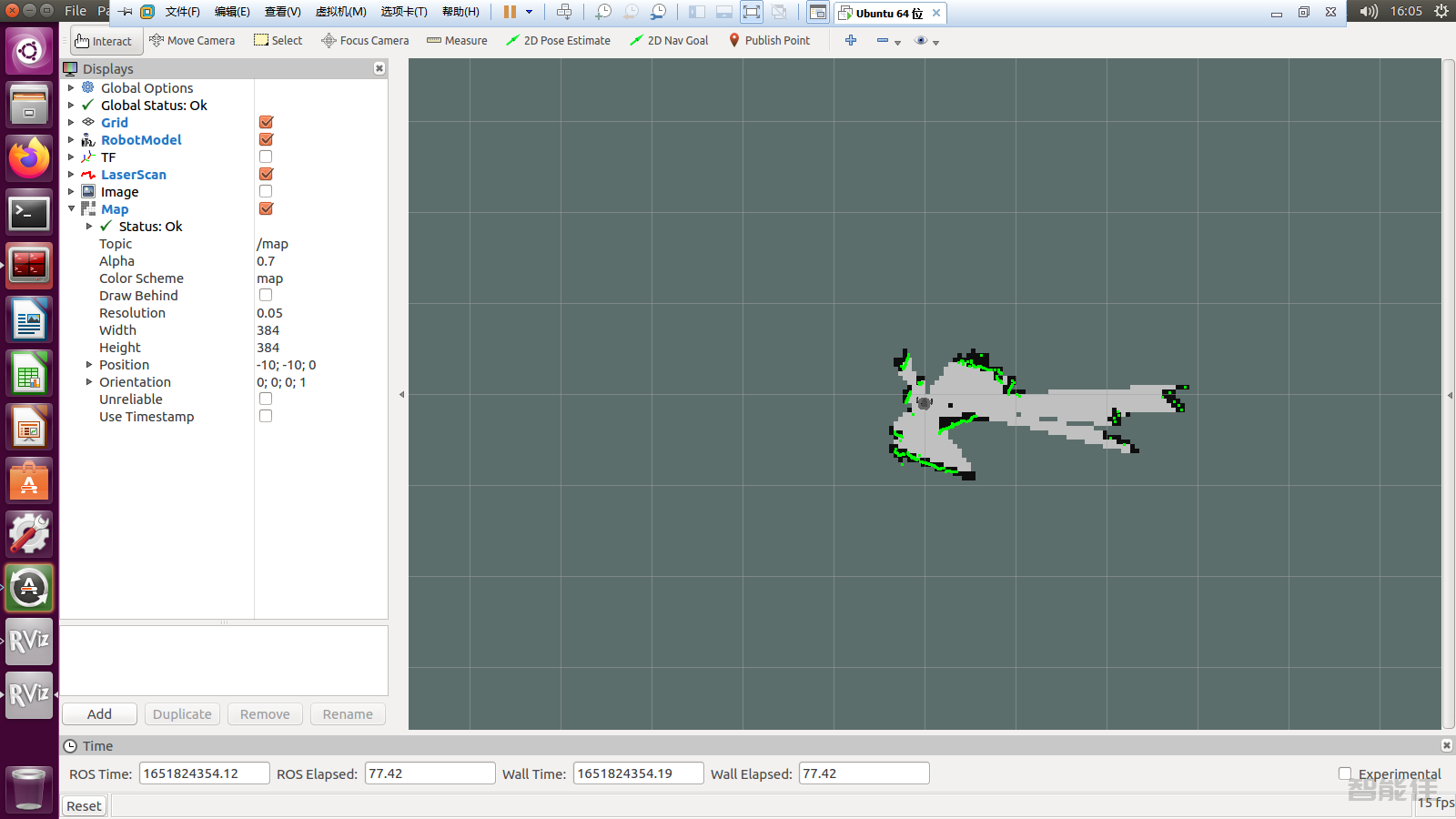
SLAM(The Simultaneous Localization and Mapping) 同步定位与地图构建: 希望机器人从未知环境的未知地点出发, 在运动过程中通过重复观测到的地图特征(比如, 墙角, 柱子等) 定位自身位置和姿态,再根据自身位置增量式的构建地图,从而达到同时定位和地图构建的目的。通过远程操作创建地图1)[Remote PC] 启动roscoreroscore2)[TurtleBot3] 启动TurtleBot3roslaunch turbot3_br...
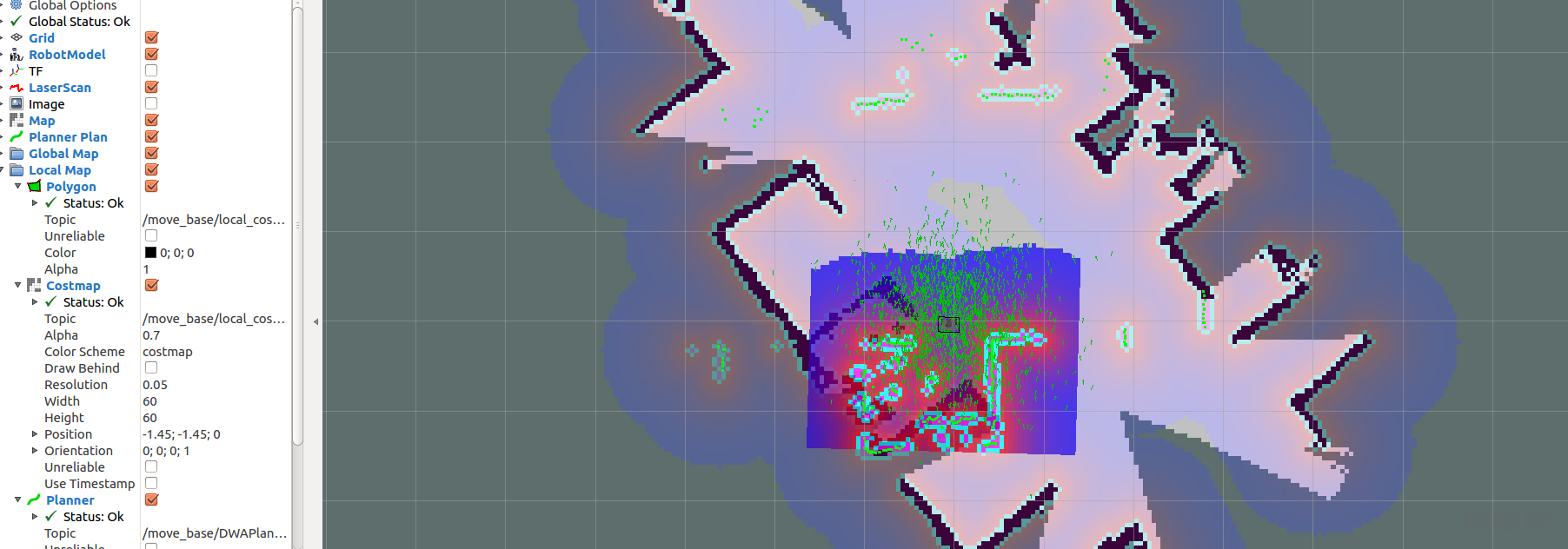
1)[Remote PC] 启动roscoreroscore2)[TurtleBot3] 启动TurtleBot3roslaunch turbot3_bringup minimal.launch3)[Remote PC] 启动导航roslaunch turbot3_navigation navigation_laser.launch map_file:=$HOME/map.yaml4)[Remote PC] 启动Rvizroslaunch turbot3_rviz navig...
1.当电池电压低于11V时,蜂鸣器报警将持续响起,舵机轮子将被禁用。当蜂鸣器报警响起时,电池必须进行充电。...