
ToddlerBot: 开源仿人机器人平台——低成本、高灵活性的AI学习与操作专家微信公众号文章链接跳转:https://mp.weixin.qq.com/s/6trQtVq4K8USg1XC-Fl6pAToddlerBot是一个开源的、与机器学习兼容的仿人机器人平台,旨在高效地在模拟环境和现实世界中收集大规模、高质量的训练数据。该平台由斯坦福大学的设计团队开发,具备30个自由度(DoFs),支持多种控制策略,如强化学习、模仿学习等,适用于广泛的研究和应用场景。产品亮点低成本...
/
2751 次浏览/
人形机器人

Orca Core 是 ORCA Hand 的核心控制包。它用于抽象硬件,提供校准和张紧脚本,并在关节空间中使用简单的高级控制方法来控制机械手。采购链接开始要开始使用 Orca Core,请按照以下步骤操作:下载代码:git clone https://ghfast.top/https://github.com/orcahand/orca_core.git 1.创建虚拟环境(推荐):python3 -m venv venvsource venv/bin/a...
/
2101 次浏览/
灵巧手

智能佳—Gello-UR机械臂遥操作—操作引导视频/* 仅针对本页面的局部样式,不影响全局 */
.product-video-container {
max-width: 100%;
margin: 20px 0;
background: #fff;
border-radius: 4px;
overflow: hidden;...

点击跳转项目地址:https://wuphilipp.github.io/gello_site/代码地址:https://github.com/wuphilipp/gello_software...

采购点击跳转:项目网站:https://jasonjzliu.com/factr/代码开源地址:https://github.com/JasonJZLiu/FACTR_Teleop...
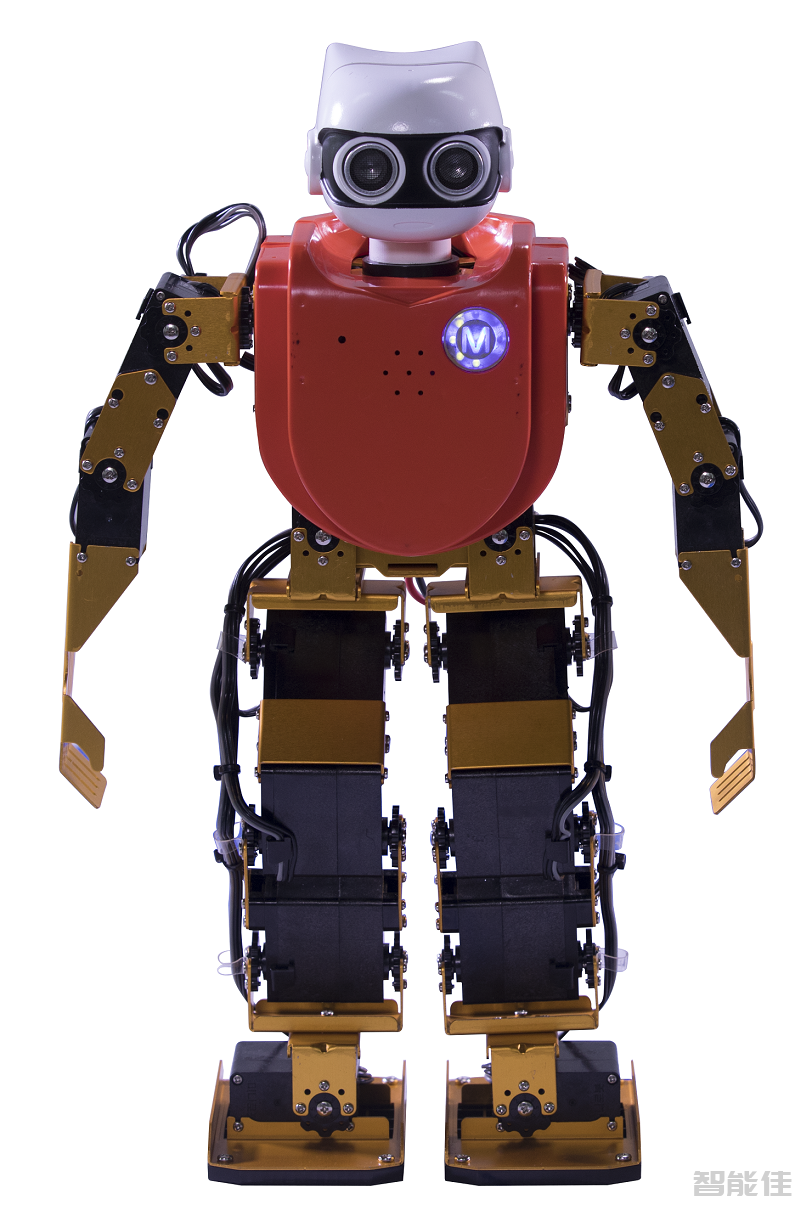
仿人机器人Super-MS采用高强度铝合金材质,具有17个运动模块组建,有头部、身体、四肢等人形结构特征和基本动作,比如行走、转身、弯腰、单腿站立、前后滚翻、俯卧撑等动作。适合做人形机器人教学、多机器人协作实验、各种人形机器人表演及比赛。...

机器人配置如下:...
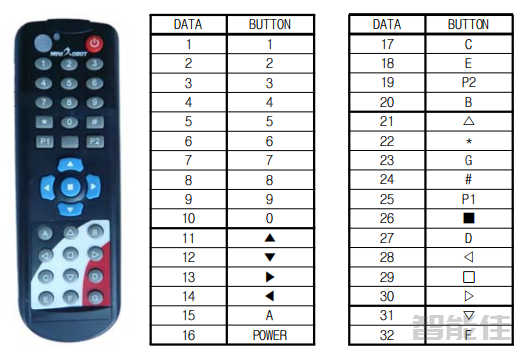
1.检查机器人外观是否完好2.按下遥控器 按键,观察机器人是否有反应3.将机器人放倒,看机器人是否会爬起来...
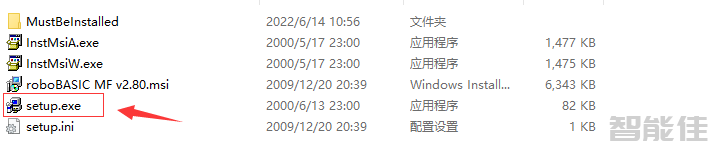
1.下载软件包。解压该软件包。安装软件包。 ① 双击 “Setup.exe”文件。 ②安装弹出窗口会出现下面消息。单击<Next>。③选择一个文件夹来安装RoboBasic。然后,单击<Next>。点击next安装程序将被执行。软件安装完成,点击close。计算机的主屏幕会出现小图标roboBASIC MF V2.8。运行该可执行程序,会出现下面界面样式。重要步骤 重要步骤 ...
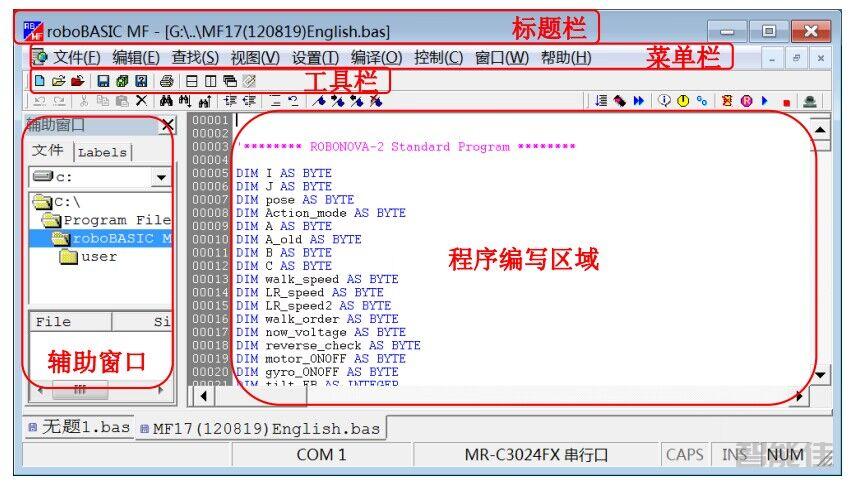
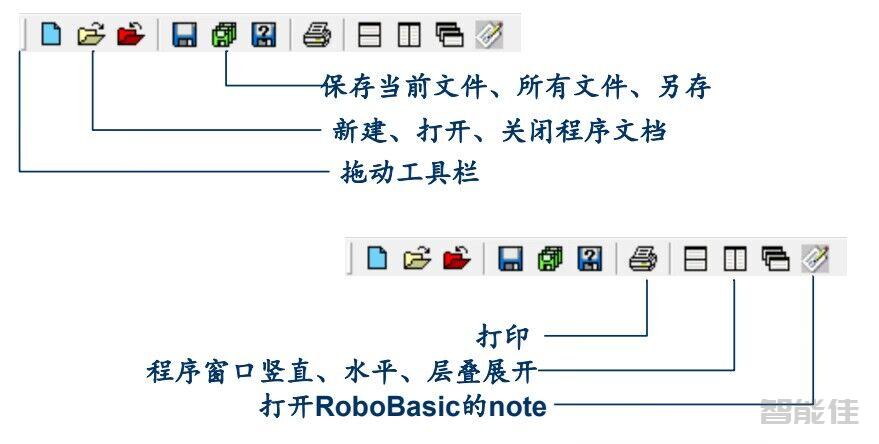
界面说明标题栏菜单栏菜单栏菜单栏点击MF?置零点窗口菜单控制菜单实时控制...
...

机器人具备电池电量检测功能,机器人右胸前的“M”标识周围有一圈黄绿色的LED灯,电池电量充足到电量不足,亮起的绿色电量显示LED灯会逐渐减少。当亮起的LED灯只剩下一个的时候表明电池电量不足,请及时充电。...
⑴正确开启和关闭机器人,安装正常表演的开机顺序进行开机操作,首先,路由器供电,开启平板电脑电源,打开机器人表演APP,连接路由器Robot-2018的WIFI,然后开启音箱和仿人机器人。⑵操作仿人机器人时请保证机器人身体竖直放置,仿人机器人开机后会判断自己是否摔倒,并自动站起,错误操作可能导致夹手。和机器人保持一定的安全距离(1-2m)。⑶远离小孩。在无人照看的情况下,可能会对小孩造成伤害。⑷如果在机器人身上闻到特殊气味或有烟产生,请立即切断电源开关。⑸机器人表演场地要求水平...
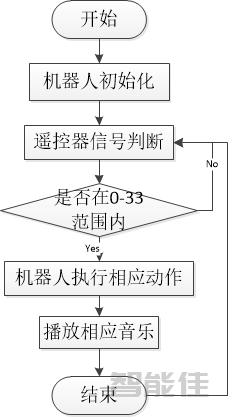
动作编程舵机控制:控制范围:10-190度中间位置:100度机器人组成机器人共有17个关节,即17个伺服电机,其中,每条腿上分别有5个,每个胳臂上分别有3个(肩、臂、手),头部1个每个关节可以旋转180度动作实现原理主控芯片对应四肢(ABCD)17个电机执行相应指令控制身体各部关节伺服电机运行...
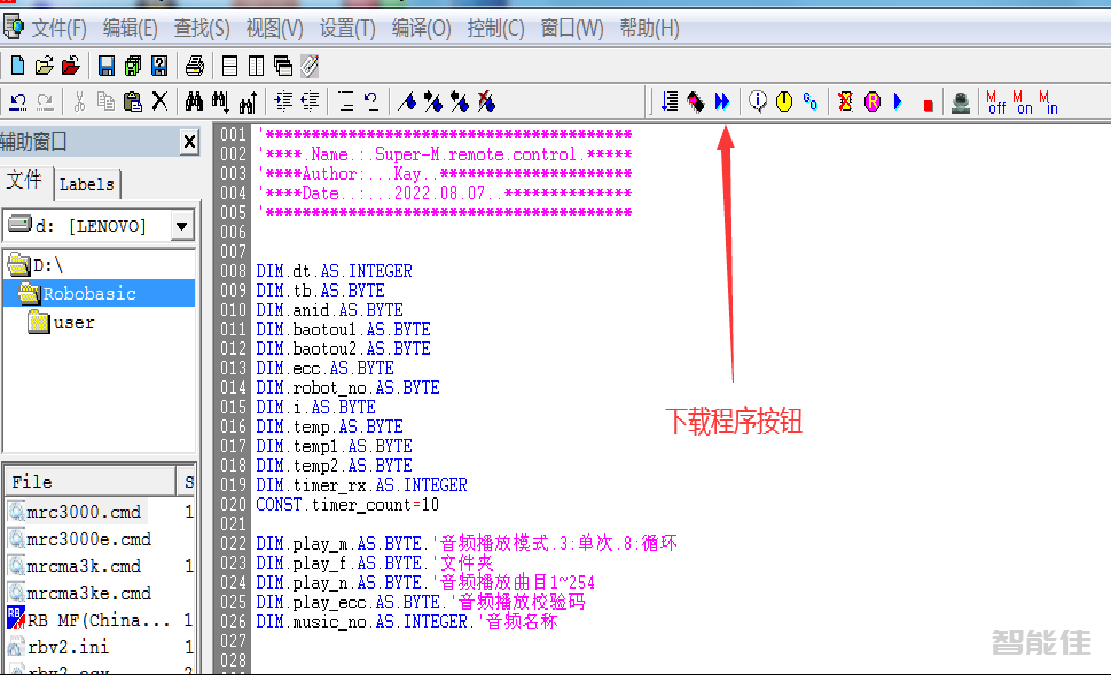
写好程序后,要点击编译、下载按键...