ToddlerBot: 开源仿人机器人平台——低成本、高灵活性的AI学习与操作专家微信公众号文章链接跳转:https://mp.weixin.qq.com/s/6trQtVq4K8USg1XC-Fl6pAToddlerBot是一个开源的、与机器学习兼容的仿人机器人平台,旨在高效地在模拟环境和现实世界中收集大规模、高质量的训练数据。该平台由斯坦福大学的设计团队开发,具备30个自由度(DoFs),支持多种控制策略,如强化学习、模仿学习等,适用于广泛的研究和应用场景。产品亮点低成本...
2025-06-24 /
2750 次浏览 /
人形机器人
Orca Core 是 ORCA Hand 的核心控制包。它用于抽象硬件,提供校准和张紧脚本,并在关节空间中使用简单的高级控制方法来控制机械手。采购链接开始要开始使用 Orca Core,请按照以下步骤操作:下载代码:git clone https://ghfast.top/https://github.com/orcahand/orca_core.git 1.创建虚拟环境(推荐):python3 -m venv venvsource venv/bin/a...
2025-12-24 /
2099 次浏览 /
灵巧手
智能佳—Gello-UR机械臂遥操作—操作引导视频/* 仅针对本页面的局部样式,不影响全局 */
.product-video-container {
max-width: 100%;
margin: 20px 0;
background: #fff;
border-radius: 4px;
overflow: hidden;...
点击跳转项目地址:https://wuphilipp.github.io/gello_site/代码地址:https://github.com/wuphilipp/gello_software...
采购点击跳转:项目网站:https://jasonjzliu.com/factr/代码开源地址:https://github.com/JasonJZLiu/FACTR_Teleop...
DR: if your ACT policy is jerky or pauses in the middle of an episode, just train for longer! Success rate and smoothness can improve way after loss plateaus.Project Website: https://tonyzhaozh.github.io/aloha/This repo contains the impleme...
要设置新终端,请运行:conda activate alohacd ~/interbotix_ws/src/aloha/aloha_scripts我们one_side_teleop.py跑的是测试远程操作,没有数据收集。要收集某一集的数据,请运行:python3 record_episodes.py --task_name <your task_name> --episode_idx 0例如:python3 record_episodes.py --task_na...
sudo apt install curlcurl 'https://raw.githubusercontent.com/Interbotix/interbotix_ros_manipulators/main/interbotix_ros_xsarms/install/amd64/xsarm_amd64_install.sh' > xsarm_amd64_install.shchmod +x xsarm_amd64_install.sh./xsarm_a...
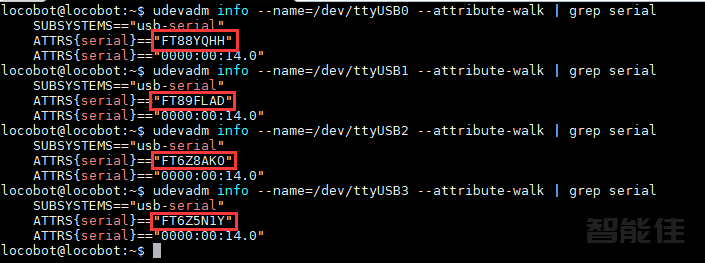
每个机器人绑定的端口可能会随着时间的推移而改变,例如最初的机器人ttyUSB0可能会突然变成ttyUSB5。为了解决这个问题,我们使用以下映射将每个机器人绑定到固定的符号链接端口:ttyDXL_master_right:右主机机器人(主机:操作者手持的机器人)ttyDXL_puppet_right:右从机机器人(从机:执行任务的机器人)ttyDXL_master_left: 左主机机器人ttyDXL_puppet_left: 左从机机器人以ttyDXL_m...
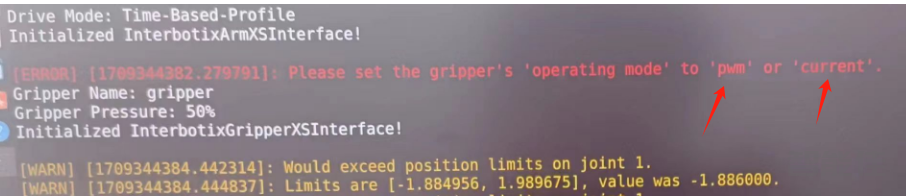
电机上的红色LED闪烁如果电机的LED大约每秒闪烁一次,则表明其处于错误状态。在此状态下,电机将关闭扭矩并且不响应命令。发生这种情况的两个常见原因是“过载”或“过热”。如果电机被命令转到某个位置,但实际上由于有障碍物而无法实现,则可能会发生过载。如果使用两指夹具进行位置控制,通常会出现这种情况。如果夹具被命令完全靠近一个小的刚性物体,电机将停转,并在几秒钟后进入错误状态。因此,如果使用夹具进行位置控制,请确保将夹具关闭到足以抓住物体的程度,但不要过多。或者,使用PWM或电流控...
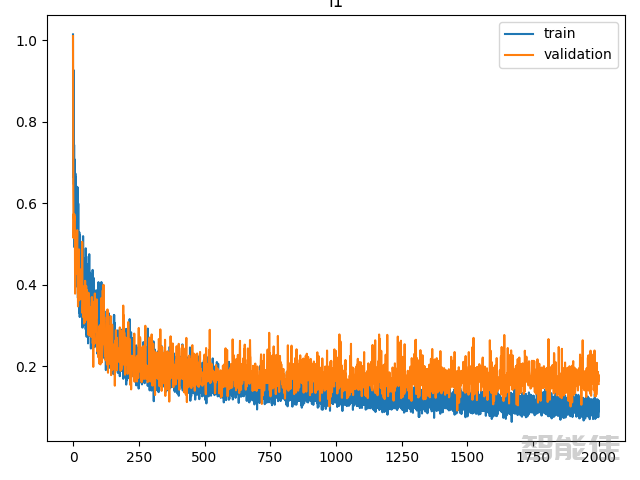
TL;DR:如果您的ACT政策不稳定或在剧集中间暂停,请训练更长时间!成功率和平滑度可以在损失达到稳定水平后得到改善。ACT调整提示-在将ACT应用于新环境时,块大小chunk_size是最重要的参数。一个区块应对应约1秒钟机器人运动。-高KL重量(10或100),或不带CVAE编码器的列车。-考虑删除temporal_agg,并在此处增加查询频率,使其与块大小相同。即,每个块都被完全执行。-训练很长时间(在事情趋于平稳之后,见图)-尽量增加batch_size大小,并相应地...
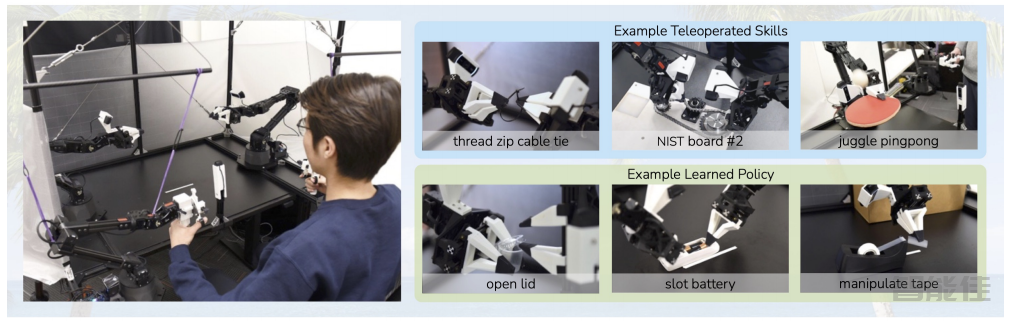
对于机器人来说,诸如穿扎带或插入电池等精细操作任务是众所周知的困难,因为它们需要精确度、接触力的仔细协调以及闭环视觉反馈。执行这些任务通常需要高端机器人、精确的传感器或仔细的校准,这些可能既昂贵又难以设置。学习能否使用低成本且不精确的硬件来执行这些精细的操作任务?我们提出了一种低成本系统,可以直接从通过自定义远程操作界面收集的真实演示中执行端到端模仿学习。然而,模仿学习也面临着自身的挑战,特别是在高精度领域:策略中的错误可能会随着时间的推移而复合,而人类的演示可能是不稳定的。...
Ubuntu镜像下载Ubuntu 20.04.6 LTS (Focal Fossa)ROS安装wget http://fishros.com/install -O fishros && . fishros...
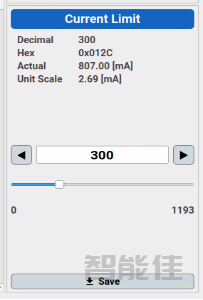
设置的是大臂VX300机器人夹具打开Dynamixel Wizard,然后选择从机臂的手腕电机。注意:修改的是大臂的9号舵机[ID:009] XM430-W350提示:机器人与Dynamixel Wizard对话时,底座上的LED灯会闪烁。这将有助于确定选择哪个机器人。找到38 Current Limit(位置寄存器38),输入300,然后点击底部save。对两个大臂VX300机器人的9号舵机重复此操作。这限制了通过夹具电机的最大电流,以防止过载错误。...
下载原始aloha 包可能会有报错提醒:可以通过以下方案进行解决:找到aloha文件夹下的config文件夹下的4个配置文件,文件名称分别为master_modes_left.yaml、master_modes_right.yaml、puppet_modes_left.yaml、puppet_modes_right.yaml按照下图进行修改:port: /dev/ttyDXL_master_left
groups:
arm...