SLAM(The Simultaneous Localization and Mapping) 同步定位与地图构建: 希望机器人从未知环境的未知地点出发, 在运动过程中通过重复观测到的地图特征(比如, 墙角, 柱子等) 定位自身位置和姿态,再根据自身位置增量式的构建地图,从而达到同时定位和地图构建的目的。通过远程操作创建地图1)[Remote PC] 启动roscoreroscore2)[TurtleBot3] 启动TurtleBot3roslaunch turbot3_br...
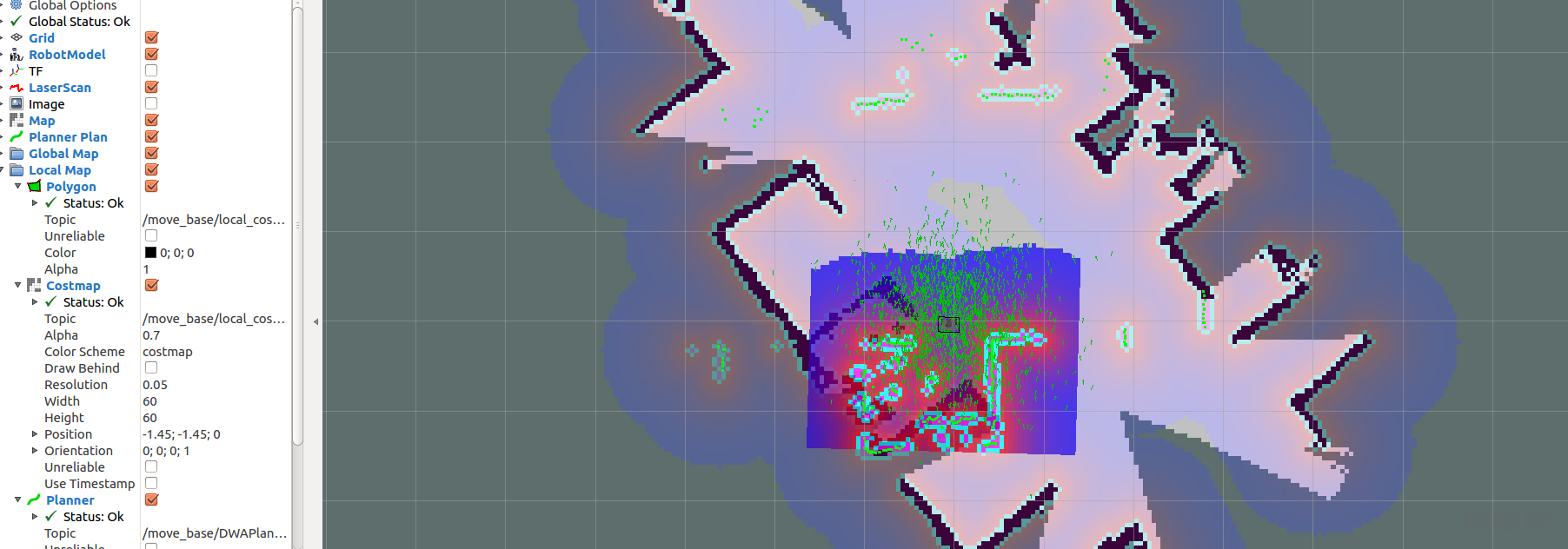
1)[Remote PC] 启动roscoreroscore2)[TurtleBot3] 启动TurtleBot3roslaunch turbot3_bringup minimal.launch3)[Remote PC] 启动导航roslaunch turbot3_navigation navigation_laser.launch map_file:=$HOME/map.yaml4)[Remote PC] 启动Rvizroslaunch turbot3_rviz navig...
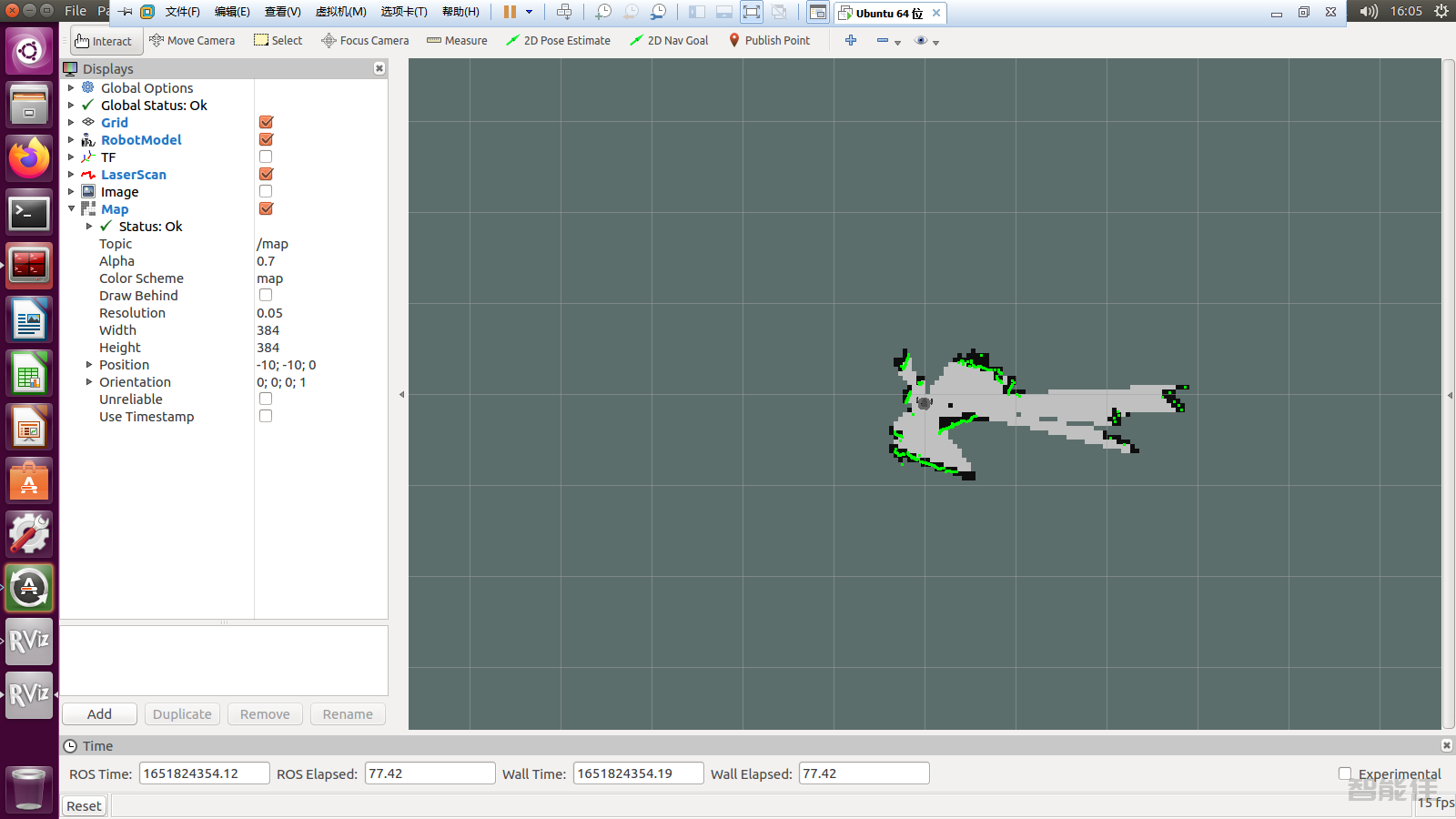
1)[Remote PC] 启动roscoreroscore2)[TurtleBot3] 启动TurtleBot3roslaunch turbot3_bringup minimal.launch 3)[TurtleBot3] 启动karto算法。roslaunch turbot3_slam karto_demo.launch 4)[Remote PC] 启动Rvizroslaunch turbot3_rviz navigation_rviz.launch 5)[Remote...
1)[Remote PC] 启动roscoreroscore2)[TurtleBot3] 启动TurtleBot3roslaunch turbot3_bringup minimal.launch 3)[TurtleBot3] 启动hecotorroslaunch turbot3_slam hector_demo.launch 4)[Remote PC] 启动rvizroslaunch turbot3_rviz navigation_rviz.launch 5)[Remote...

充电...
1.当电池电压低于11V时,蜂鸣器报警将持续响起,舵机轮子将被禁用。当蜂鸣器报警响起时,电池必须进行充电。...