
ToddlerBot: 开源仿人机器人平台——低成本、高灵活性的AI学习与操作专家微信公众号文章链接跳转:https://mp.weixin.qq.com/s/6trQtVq4K8USg1XC-Fl6pAToddlerBot是一个开源的、与机器学习兼容的仿人机器人平台,旨在高效地在模拟环境和现实世界中收集大规模、高质量的训练数据。该平台由斯坦福大学的设计团队开发,具备30个自由度(DoFs),支持多种控制策略,如强化学习、模仿学习等,适用于广泛的研究和应用场景。产品亮点低成本...
/
2854 次浏览/
人形机器人

智能佳—Gello-UR机械臂遥操作—操作引导视频/* 仅针对本页面的局部样式,不影响全局 */
.product-video-container {
max-width: 100%;
margin: 20px 0;
background: #fff;
border-radius: 4px;
overflow: hidden;...

点击跳转项目地址:https://wuphilipp.github.io/gello_site/代码地址:https://github.com/wuphilipp/gello_software...

采购点击跳转:项目网站:https://jasonjzliu.com/factr/代码开源地址:https://github.com/JasonJZLiu/FACTR_Teleop...

机器人集群分布式控制是指一组机器人(称为集群)通过分散控制和通信来协作执行任务的系统架构。在这种设置中,集群中的每个机器人都自主运行,根据本地信息做出决策并与其直接邻居进行交互。集体行为源于各个机器人之间的互动和合作,使它们能够作为一个群体完成复杂的任务。 机器人集群分布式控制的主要特点包括:分散决策:集群中的每个机器人都有自己的传感器和处理能力,使其能够独立做出决策。去中心化决策意味着没有任何一个机器人或中央实体决定整个集群的行为。本地通信:机器人通过本地交互相互...
/
1735 次浏览/
群体智能
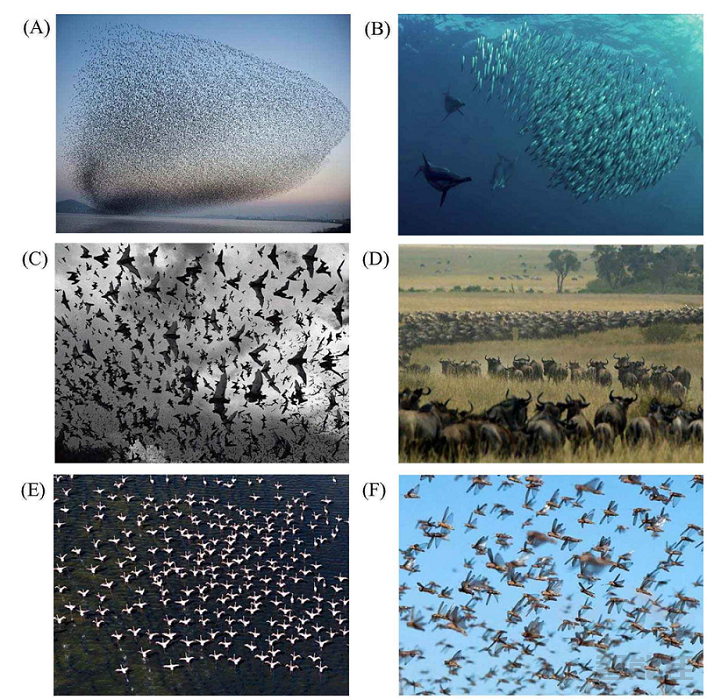
群体行为是指一群机器人通过分散和自组织的交互共同努力实现共同目标所表现出的集体行为。这个概念的灵感来自于自然系统中观察到的集体行为,例如昆虫群、鸟群和鱼群。机器人群体智能背景下群体行为的关键特征包括:去中心化:集群中的机器人具有高度的自主性。每个机器人都遵循基于本地信息以及与附近机器人交互的简单规则,而不依赖中央控制器来指示它们的动作。本地通信:机器人在本地级别上相互通信,共享有关其状态、环境或任务的信息。这种本地通信对于协调群体内的行动至关重要。涌现属性:群体的整体行为是由...
/
1568 次浏览/
群体智能

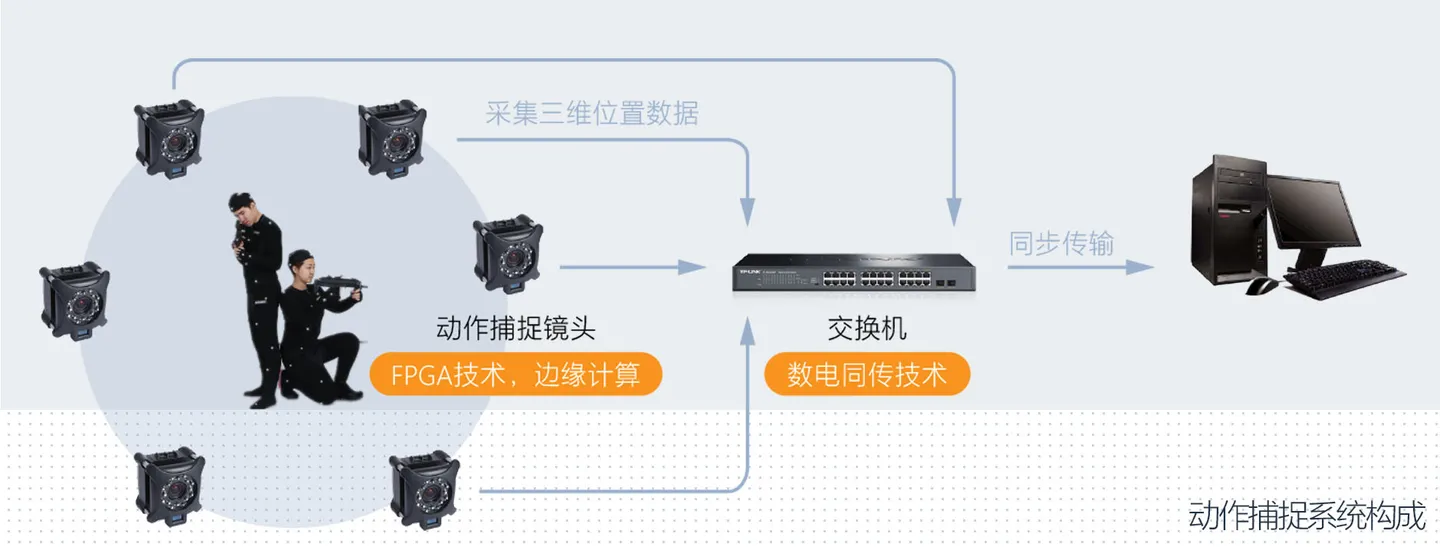
准确定位机器人对于各种应用至关重要,为此可以采用不同的技术。常见的方法包括:全球定位系统(GPS):对于室外环境,GPS是广泛使用的机器人定位技术。机器人上的 GPS 接收器可以与卫星通信以确定机器人的位置。惯性测量单元 (IMU): IMU 使用加速计和陀螺仪来测量速度和方向的变化,帮助估计机器人的位置和航向。它们通常与其他传感器结合使用以提高准确性。编码器:车轮编码器测量车轮的旋转,并与车轮尺寸的信息相结合,使机器人能够估计其行驶距离,从而估计其位置。计算机视觉:相机和图...
/
1360 次浏览/
群体智能
安装 vrpn_client_rossudo apt-get install ros-$ROS_DISTRO-vrpn-client-roscd ~/omnidirectbot_wscatkin_make - DCATKIN_WHITELIST_PACKAGES=”vrpn_client_ros” 下载源码cd ~/omnidirectbot_ws/srcgit clone https://mirror.ghproxy.com/https://github.com/...
/
2359 次浏览/
群体智能
下载ros源码对于Epuck2本体WIFI控制来说git clone -b e-puck2_wifi http://mirror.ghproxy.com/https://github.com/gctronic/epuck_driver_cpp对于Pi-puckgit clone -b pi-puck http://mirror.ghproxy.com/https://github.com/gctronic/epuck_driver_cpp.git把源码中的#include &...
/
1384 次浏览/
群体智能
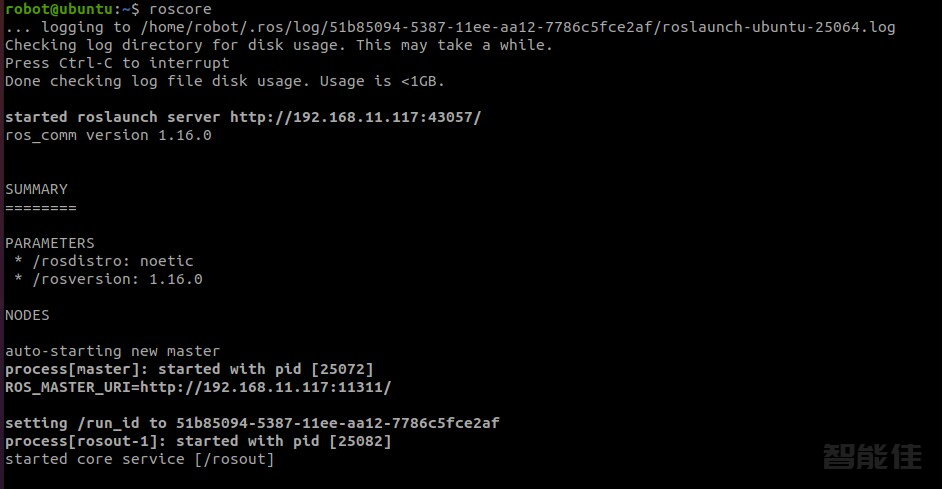
单车测试查询机器人IP,通过路由器后台,或者使用serial Moniter来查询IP,参考修改launch文件运行launch文件roslaunch epuck_driver_cpp multi_epuck2.launch机器人蓝灯闪烁,进入受控制模式运行rostopic listrostopic list...
/
1497 次浏览/
群体智能
启动控制程序:rosrun epuck_driver_cpp four_points.py...
/
1524 次浏览/
群体智能