TurtleBot3入门教程-7.启动机器人
这一节我们来讲Turtlebot3如何启动和使用
1.启动主机
[远程主机(笔记本电脑)]运行roscore
笔记本电脑打开终端(ctrl+Alt+T),获取root权限,输入roscore,如果显示 started core service [/rosout] ,则说明roscore打开成功。
roscore
2.启动Turtlebot3
[Turtlebot3之树莓派]启动launch文件
运行机器人程序
roslaunch turtlebot3_bringup turtlebot3_robot.launch
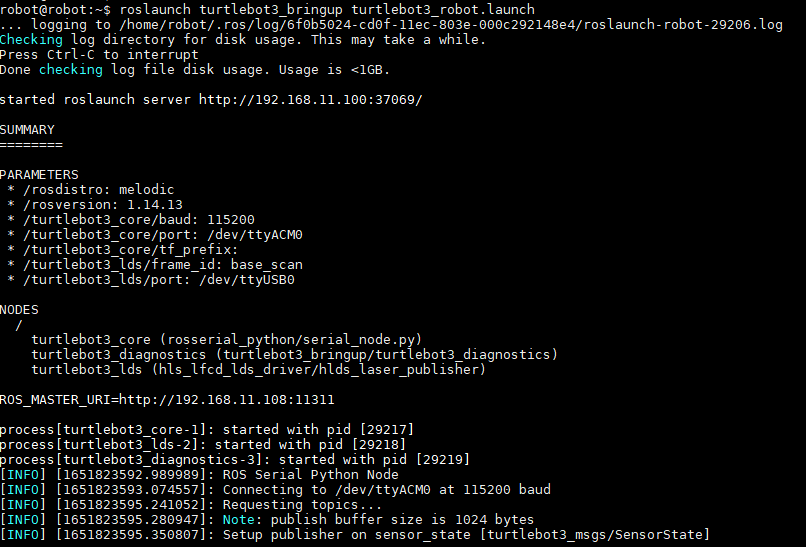
注意:如果终端中出现“lost sync with device”错误提示,请检查TurtleBot3上的传感器是否已插好。