TurtleBot3入门教程-8.远程控制
这一节我们来讲远程控制Turtlebot3的方法
1.说明
此方法是在远程PC(笔记本电脑)操作的,而不是在树莓派(机器人)上操作的。在树莓派(机器人)上操作此步骤是无用的。
其他几种无线设备(例如PS3,XBOX 360,ROBOTIS RC100等)也可以控制。
下面以远程笔记本的键盘控制为例:
2.方法
[远程主机(远程PC)]运行远程操作
roslaunch turtlebot3_teleop turtlebot3_teleop_key.launch
3.结果
[远程主机(笔记本电脑)] 如果文件成功启动,终端将显示以下内容。
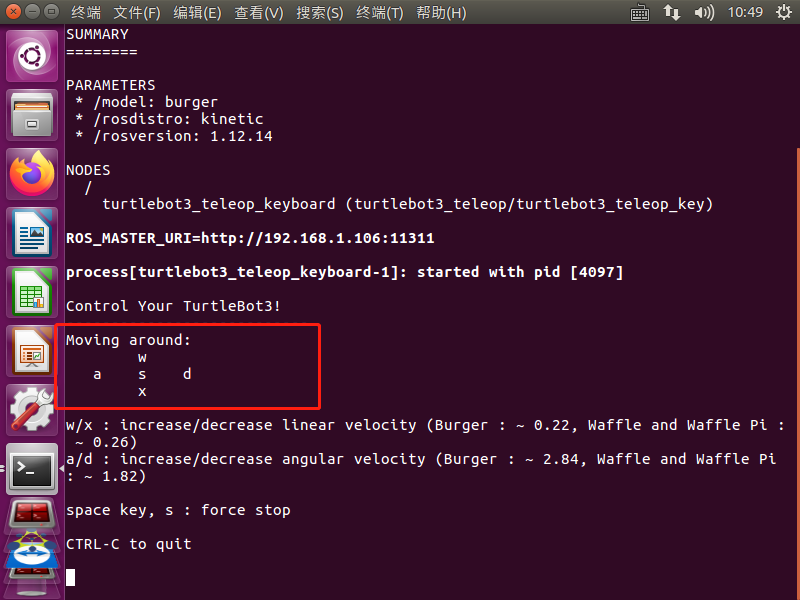
接下来就可以通过笔记本电脑上的w/x/a/d/s来控制机器人的前、后、左、右、停动作了。
按键说明:w/x:增加/减少线速度(前后)
a/d:增加/减少角速度(左右)
空格/s:急停按键
<< 上一篇