TurtleBot3入门教程-4.虚拟机VMware下载和安装
虚拟机镜像安装
PC端虚拟机完整镜像(联系售后人员获取)
VMware虚拟机软件与破解文档下载百度网盘链接(联系售后人员获取)
VMware虚拟机软件:https://pan.baidu.com/s/18jK6t79kFDX041O38XBjbA
提取码:261o
将上述两个文件下载完成并进行安装。
VMware虚拟机软件安装教程网上资源很多,可直接搜索查找。
虚拟机安装完成后进行破解,在“激活序列号.txt“文件中粘贴激活码进入软件填写到对应位置即可激活完成。

虚拟机软件激活安装完成之后,双击桌面图标即可进入下面界面。
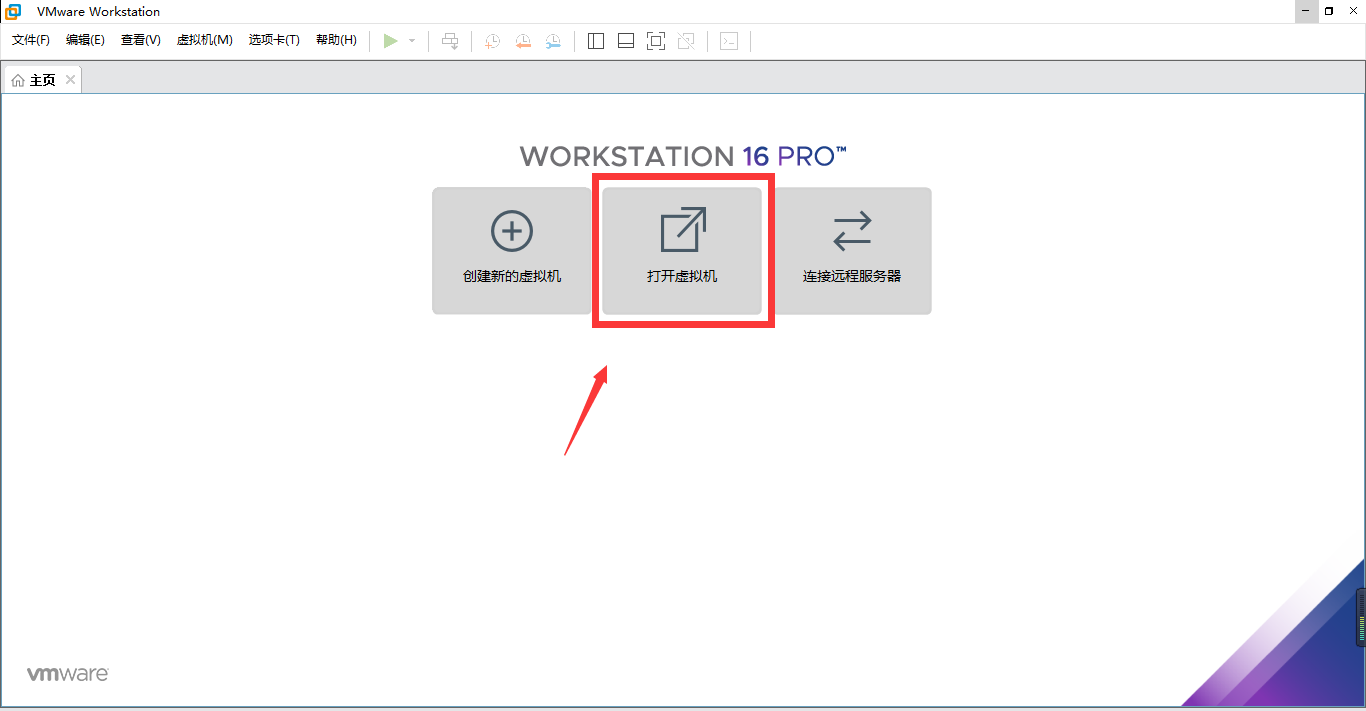
点击打开虚拟机,并找到在网盘中下载的虚拟机安装包,双击安装包文件夹,出现下面界面;

选择编辑虚拟机设置。
![]()
设置网络为桥接模式

开启虚拟机。
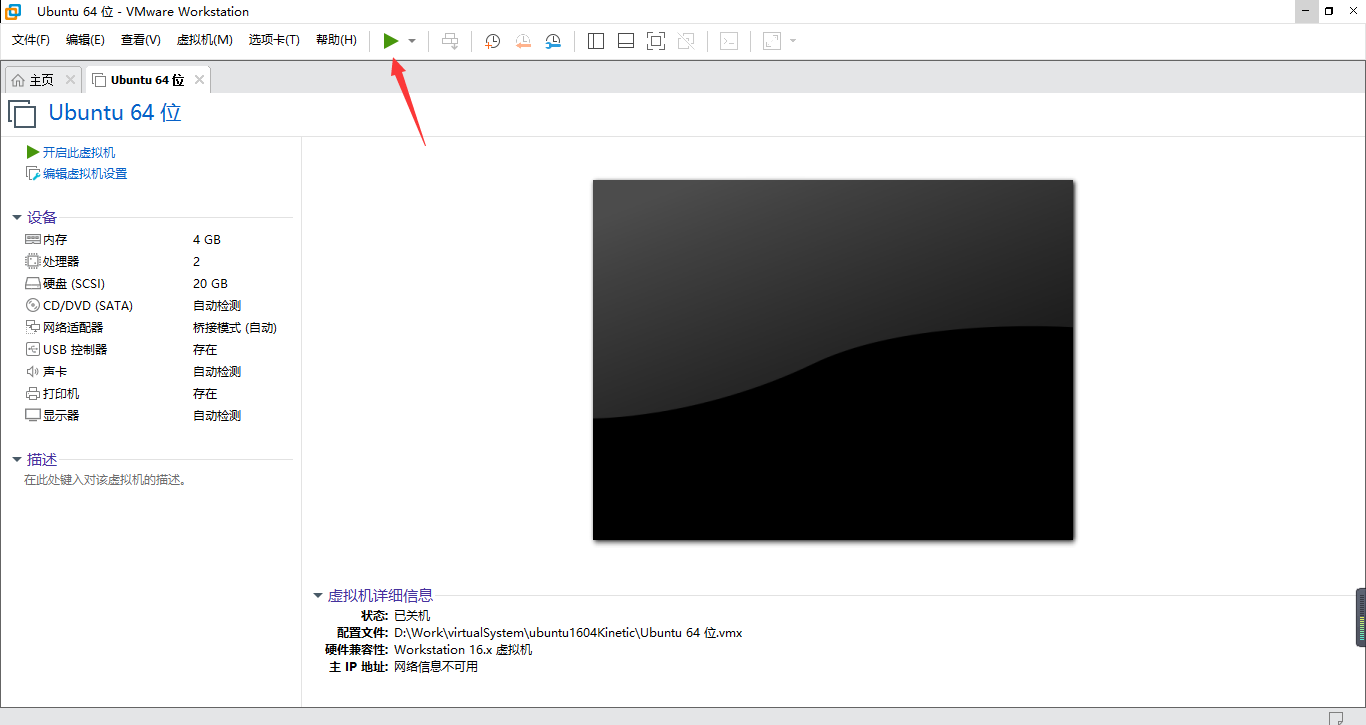
点击开启此虚拟机就可以正常开机了。
用户名:ubuntu
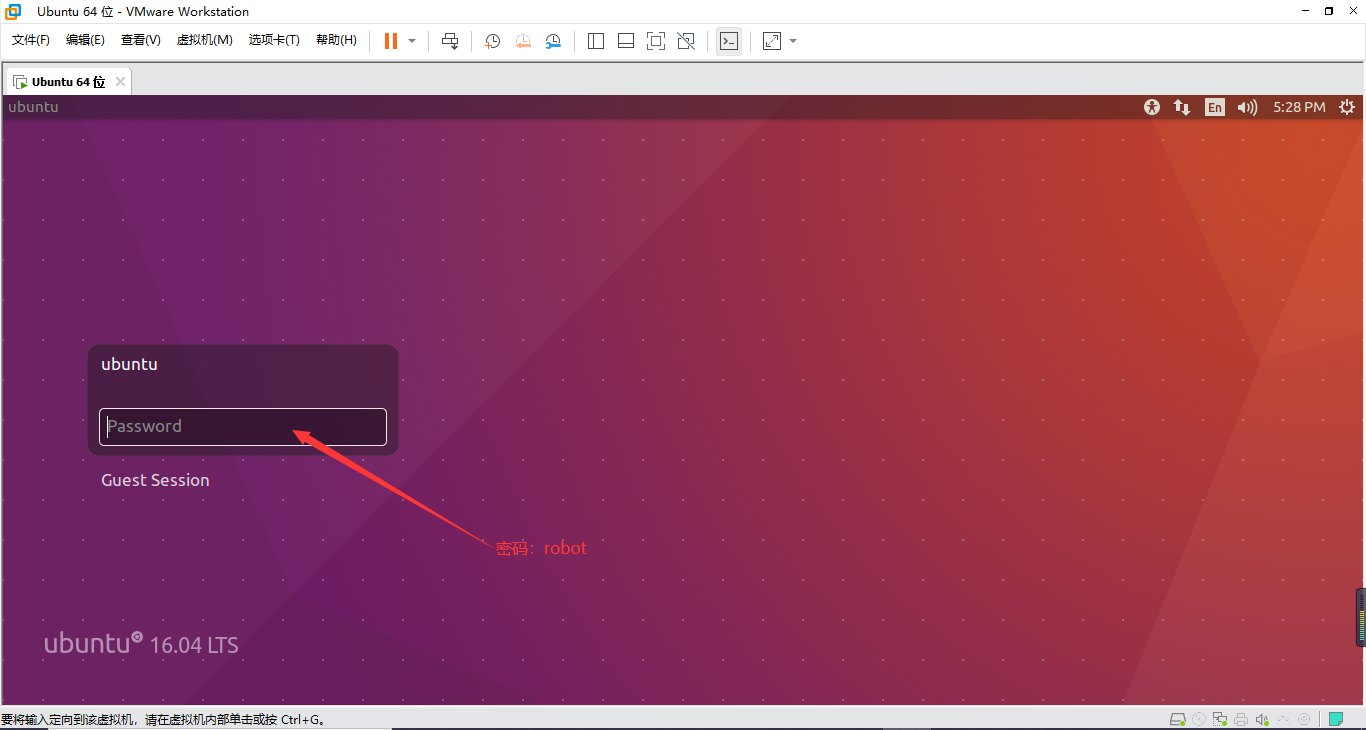 密码:robot
密码:robot
输入密码后进入下面界面。
<< 上一篇
下一篇 >>