TurtleBot3入门教程-5.虚拟机网络配置
注意:
一定要确保机器人的ip和PC的ip在同一个网段下,否则会影响机器人与PC之间的通信,不要使用校园网,在没有局域网的条件下,可以使用手机热点来操作。
打开虚拟机。
右键,打开终端(Open Terminal)

输入指令
ifconfig

gedit .bashrc

将以下两行内容,把ip修改为上述ifconfig查到的ip。

保存退出。
source .bashrc
source 使其生效。

输入roscore测试
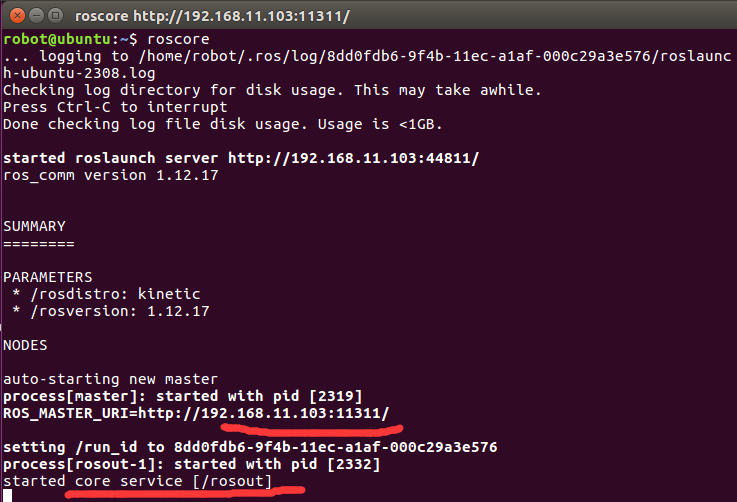
出现/rosout,说明虚拟机端的网络配置完成。
机器人端连接网络
机器人连入和虚拟机一样的网络,点击右上角的网络连接,选择您要连的wifi即可。
<< 上一篇