
项目背景对于机器人来说,诸如穿扎带或插入电池等精细操作任务是众所周知的困难,因为它们需要精确度、接触力的仔细协调以及闭环视觉反馈。执行这些任务通常需要高端机器人、精确的传感器或仔细的校准,这些可能既昂贵又难以设置。学习能否使用低成本且不精确的硬件来执行这些精细的操作任务?我们提出了一种低成本系统,可以直接从通过自定义远程操作界面收集的真实演示中执行端到端模仿学习。然而,模仿学习也面临着自身的挑战,特别是在高精度领域:策略中的错误可能会随着时间的推移而复合,而人类的演示可能是不...
![[开源项目]Mobile ALOHA低成本全身远程操作手臂](http://rosrobot.cn/zb_users/upload/2024/01/202401051704450962810480.png)
从人类演示中进行的模仿学习在机器人技术中表现出了令人印象深刻的表现。然而,大多数结果都集中在桌面操作上,缺乏一般有用任务所需的移动性和灵活性。在这项工作中,我们(斯坦福华人团队)开发了一种用于模仿双手且需要全身控制的移动操纵任务的系统。我们首先推出Mobile ALOHA,这是一种用于数据收集的低成本全身远程操作系统。它通过移动底座和全身遥控操作界面增强了ALOHA系统。然后,我们使用Mobile ALOHA收集的数据执行监督行为克隆,并发现与现有静态ALOHA数据集的联合训...
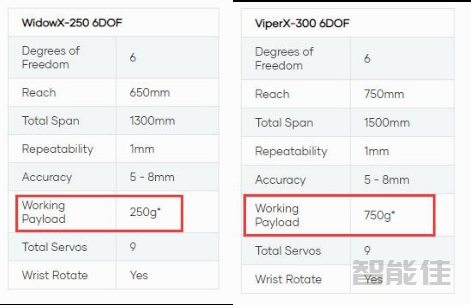
尊敬的客户:感谢您选择智能佳的WidowX-250 6DOF 和 ViperX-300 6DOF机械臂,该款产品属于科研平台,主要用于科学研究和理论验证,不建议用于实际工业生产。当您收到该套产品时,请及时进行设备硬件检查,确保产品完好无损。在使用过程中请严格按照产品使用说明书的要求进行使用、维护和保管,以避免因不当操作而导致的损害。WidowX-250 6DOF 和 ViperX-300 6DOF 机械臂是...
![[资讯]国内也可以直接采购谷歌与斯坦福联合开发的ALOHA 2双臂协作开源平台了](http://rosrobot.cn/zb_users/upload/2024/02/202402201708422963558886.jpg)
2024年1月,谷歌 DeepMind 联合斯坦福推出了ALOHA 的增强版本 ——ALOHA 2。与一代相比,ALOHA 2 具有更强的抓持性能、更符合人体工程学设计和更强的稳健性,并且在国内就可以直接采购,整套成本还不到20万元人民币。可订购的套装件(建议工作桌自己配置,其他设备都可以采购)多样化的演示数据集推动了机器人学习的重大进步,但此类数据的灵活性和规模可能受到硬件成本、硬件鲁棒性和远程操作难易程度的限制。推出ALOH...
镜像下载Ubuntu 20.04.6 LTS (Focal Fossa) (目前支持)Ubuntu 22.04.4 LTS (Jammy Jellyfish)ROS安装,选择noetic版本(斯坦福开源版本)wget http://fishros.com/install -O fishros && . fishros...
1、asset 机械臂模型的三维文件及仿真环境的建模文件2、byol_pytorch 与vinn相关的byol包3、detr &nb...

配置转换器配置文件查看串口序列号udevadm info --name=/dev/ttyUSB0 --attribute-walk | grep serial修改sudo vim /etc/udev/rules.d/99-fixed-interbotix-udev.rulesSUBSYSTEM=="tty", ATTRS{serial}=="AL010W9O", ENV{ID_MM_DEVICE_IGNORE}="1"...
您可以在此处使用USB集线器,但每个集线器最多可使用2个摄像头,以实现合理的延迟。为了确保所有3个摄像头都绑定到一致的端口,需要类似的步骤。相机默认绑定到/dev/video{0, 1, 2...},而我们希望有符号链接{CAM_RIGHT_WRIST, CAM_LEFT_WRIST, CAM_HIGH}举CAM_RIGHT_WRIST个例子,假设它现在绑定到/dev/video0.运行udevadm info --name=/dev/video0 --attribute-w...

这个机器人是一款四轮全向移动的小型机器人,具有高度灵活性和精准的导航能力。它配备了舵轮系统,使其能够在任何方向上平稳移动,包括侧向和斜向,这为其在复杂环境中的运动提供了极大的自由度。主要特性:四轮全向驱动:四个轮子均为舵轮,允许机器人在狭小空间中灵活移动,包括原地旋转和横向平移。六自由度机械臂:配备一个六自由度的机械臂,能够执行复杂的抓取、搬运和操作任务。机械臂的多自由度设计使其可以在三维空间中进行精确的物体操控,适用于多种应用场景。RGB LED灯:机器人上装有4个RGB...
主控制器:NVIDIA JETSON NANO嵌入式控制器:MEGA2560开源控制器尺寸(长宽高):300x300x350mm(不含机械臂高度)运动结构:四颗高精度无刷直流电机转向机构:四颗大扭矩数字舵机运动方式:全向舵轮最大速度:1.5m/s越障能力:≥25mm最大负载:5kg传感器:包含激光雷达、D543i摄像头、9轴IMU、计算模块、车载屏幕等通讯模块:WIFI通讯模块电池:12V 12000Mah大容量电池运行时间:约6小时30分钟充电时间:约4小时30分钟操作系统...
注意:出厂默认系统预装为ubuntu20.04,已经装好所需的ROS以及功能包,不需要重复安装,固件已经刷好,不需要重复刷固件。设备准备Omnidirectbot、USB鼠标、USB键盘、远程主机...
omnidirectbot入门教程-4.虚拟机VMWare下载与安装...
omnidirectbot入门教程-5.虚拟机网络配置...
omnidirectbot入门教程-6.开机、调试准备、联网...