项目背景对于机器人来说,诸如穿扎带或插入电池等精细操作任务是众所周知的困难,因为它们需要精确度、接触力的仔细协调以及闭环视觉反馈。执行这些任务通常需要高端机器人、精确的传感器或仔细的校准,这些可能既昂贵又难以设置。学习能否使用低成本且不精确的硬件来执行这些精细的操作任务?我们提出了一种低成本系统,可以直接从通过自定义远程操作界面收集的真实演示中执行端到端模仿学习。然而,模仿学习也面临着自身的挑战,特别是在高精度领域:策略中的错误可能会随着时间的推移而复合,而人类的演示可能是不...
从人类演示中进行的模仿学习在机器人技术中表现出了令人印象深刻的表现。然而,大多数结果都集中在桌面操作上,缺乏一般有用任务所需的移动性和灵活性。在这项工作中,我们(斯坦福华人团队)开发了一种用于模仿双手且需要全身控制的移动操纵任务的系统。我们首先推出Mobile ALOHA,这是一种用于数据收集的低成本全身远程操作系统。它通过移动底座和全身遥控操作界面增强了ALOHA系统。然后,我们使用Mobile ALOHA收集的数据执行监督行为克隆,并发现与现有静态ALOHA数据集的联合训...
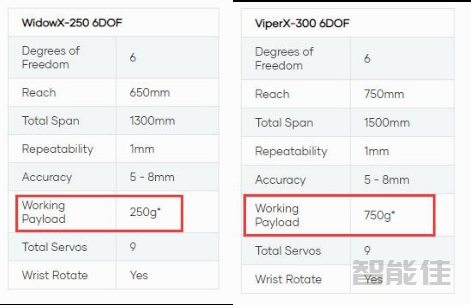
尊敬的客户:感谢您选择智能佳的WidowX-250 6DOF 和 ViperX-300 6DOF机械臂,该款产品属于科研平台,主要用于科学研究和理论验证,不建议用于实际工业生产。当您收到该套产品时,请及时进行设备硬件检查,确保产品完好无损。在使用过程中请严格按照产品使用说明书的要求进行使用、维护和保管,以避免因不当操作而导致的损害。WidowX-250 6DOF 和 ViperX-300 6DOF 机械臂是...
2024年1月,谷歌 DeepMind 联合斯坦福推出了ALOHA 的增强版本 ——ALOHA 2。与一代相比,ALOHA 2 具有更强的抓持性能、更符合人体工程学设计和更强的稳健性,并且在国内就可以直接采购,整套成本还不到20万元人民币。可订购的套装件(建议工作桌自己配置,其他设备都可以采购)多样化的演示数据集推动了机器人学习的重大进步,但此类数据的灵活性和规模可能受到硬件成本、硬件鲁棒性和远程操作难易程度的限制。推出ALOH...
XL330-M288-T是一款紧凑型智能伺服电机,适用于机器人关节和精密控制。核心特点高扭矩输出:堵转扭矩最高达0.6N·m(6V),齿轮比288.4:1,适合高负载场景。轻量化设计:仅18g,尺寸20×34×26mm,适合空间受限应用。多种控制模式:支持位置/速度/电流/PWM控制,扩展多圈位置模式(±256圈)。高精度传感:12位无接触式绝对编码器,分辨率4096脉冲/转。通信灵活:TTL串口(3.3V逻辑,兼容5V),波特率9600bps~4Mbps,支持多设备总线。安...
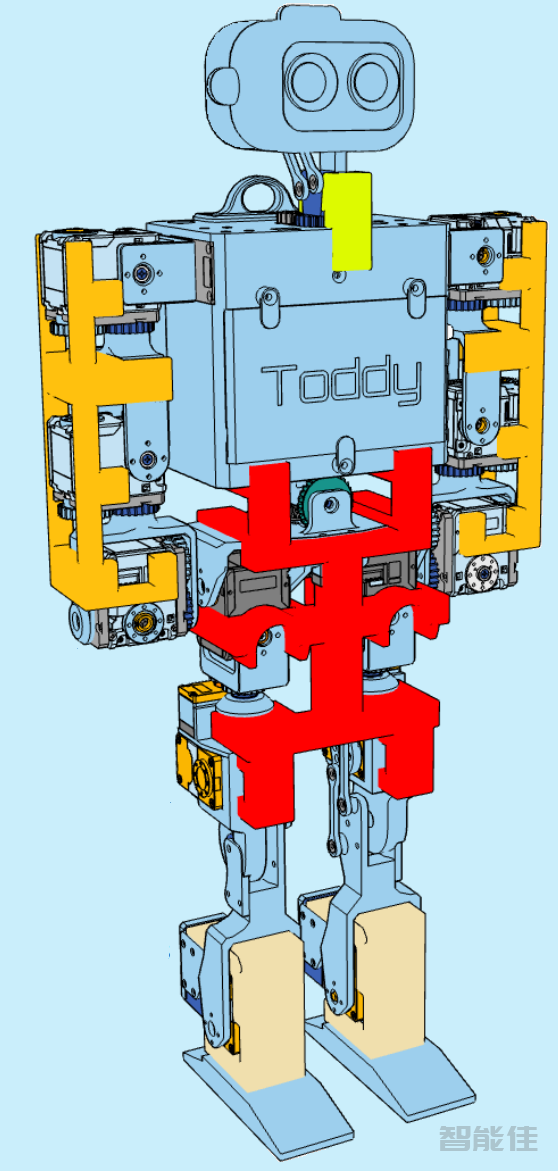
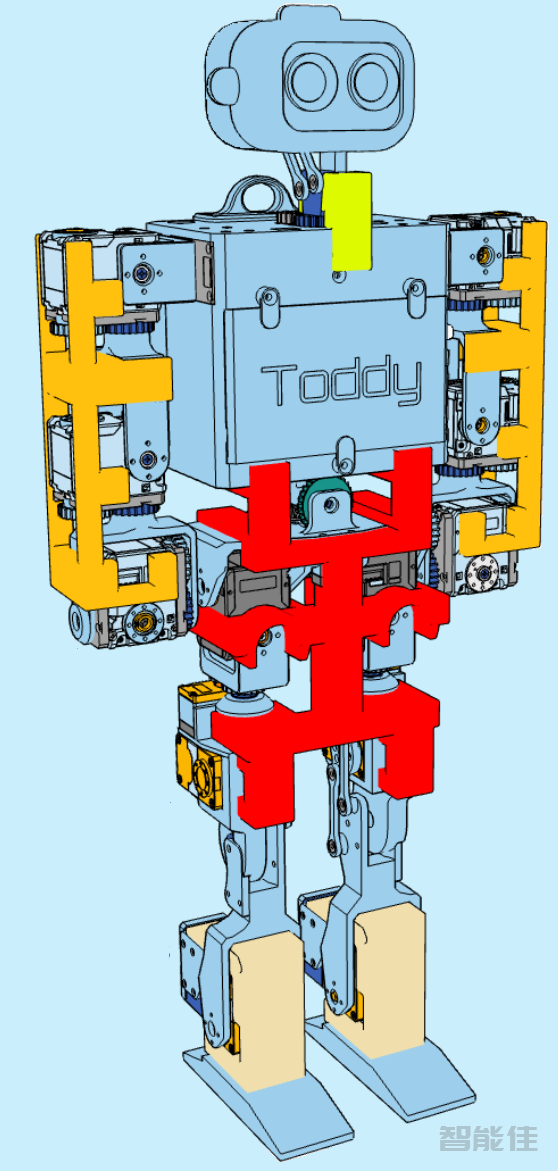
ToddlerBot 是一个低成本、开源的人形机器人平台,旨在实现可扩展的策略学习以及机器人和人工智能研究。如果您想了解有关 ToddlerBot 的更多信息,以下是一些有用的链接:论文 | 使用(中文)网站 | 视频 | 代码 | Onshape | 项目网站(英文)采购入门欢迎!本文档提供了有关构建 ToddlerBot 硬件和设置软件的全面指南。如果您是 ToddlerBot 系列的新手,我们建议您先阅读入门(硬件)和入...
2025-04-07 /
248 次浏览 /
人形机器人
启动TurtleBot3使用Ctrl+Alt+T在远程PC上打开一个新终端,其IP地址通过SSH连接到Raspberry pi的Ubuntu操作系统。。输入你在Raspberry Pi中的password[远程PC]ssh ubuntu@{IP_ADDRESS_OF_RASPBERRY_PI}启动基本软件包以启动必要的TurtleBot3应用程序。您需要指定具体的 TurtleBot3型号。[TurtleBot3 SBC]export TURTLEBOT3_MODEL=bur...
参考:https://xingying3x-cn-docs.nokov.com/...
2025-04-14 /
128 次浏览 /
群体智能
document.getElementById("spkj").style.height=document.getElementById("spkj").scrollWidth*0.76+"px";...
2025-04-07 /
118 次浏览 /
人形机器人
以下是一些帮助您开始使用ToddlerBot的提示和技巧。请仔细阅读以避免常见的陷阱。随着我们想到更多的提示和技巧,我们将继续更新此部分。硬件ü 使用直流电源时,请用胶带封住电压和电流按钮,以免意外更改设置。ü 使用电池供电运行机器人时,请务必使用电压测试仪,以避免电池过度放电。这对于防止损坏电池非常重要。ü 使用当前通信设置,Dynamixel XC330无法维持4Mbps波特率,它会发出一堆警告(无状态包)。请确保所有电机都使用2Mbps波特...
2025-04-07 /
152 次浏览 /
人形机器人
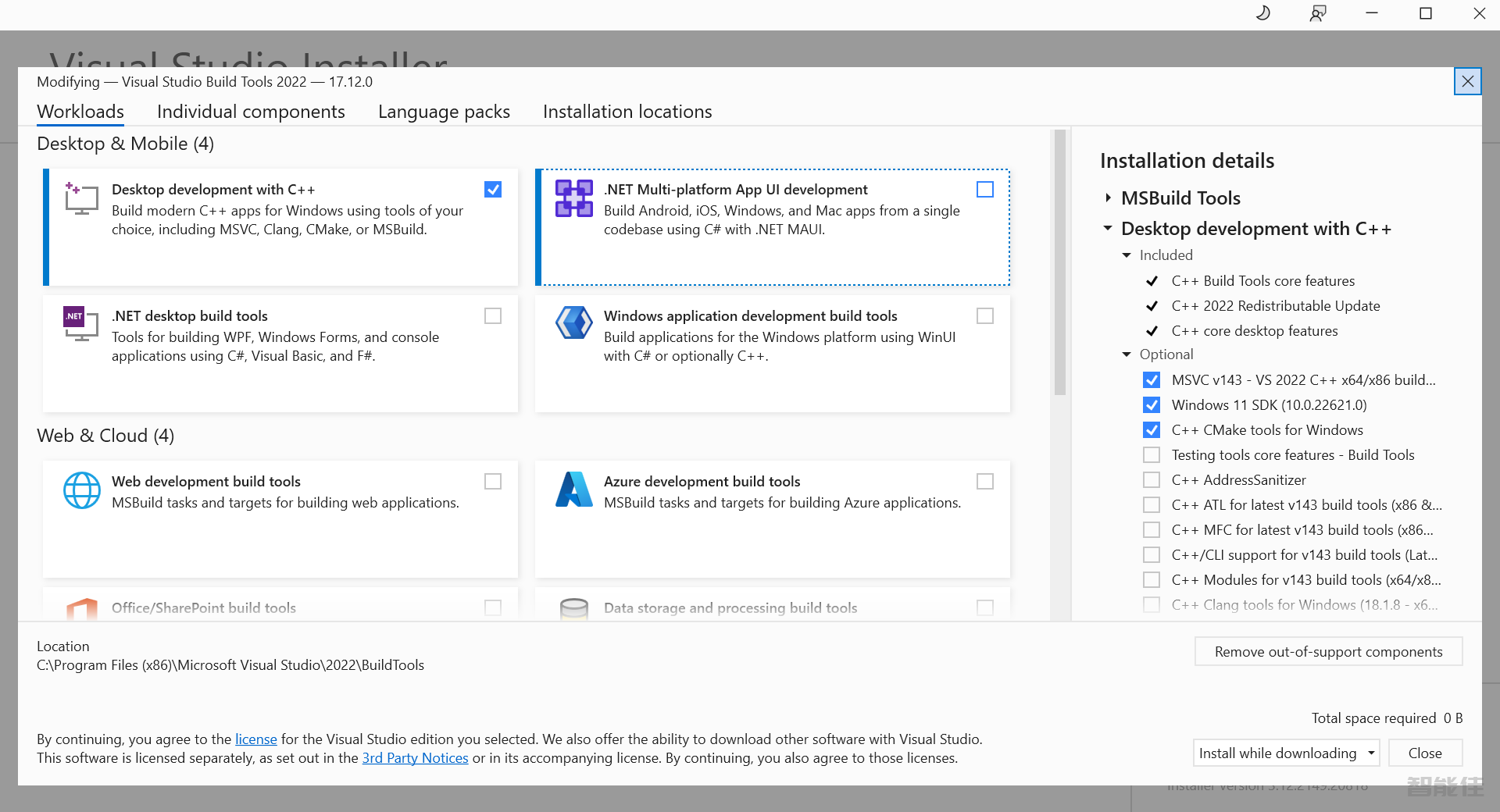
ROG Ally X是一款功能强大的手持式Windows PC,可用于远程控制ToddlerBot。我们推荐这款产品,而不是Steam Deck,因为它设置起来更容易,性能也更好。Visual Studio编译器您需要从此网站下载并安装C++ Build Tools 。运行该.exe文件并选择以下选项:访问操纵杆修改摇杆控制模式为“Gamepad”。如果您不确定如何操作,请按照本教程操作:如何在华硕ROG Ally X (2024) 上在游戏手柄和桌面控制之间切换。附加包在W...
2025-04-07 /
174 次浏览 /
人形机器人
安装步骤如下:curl -O https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-x86_64.shsha256sum ./Miniconda3-latest-Linux-x86_64.shbash ./Miniconda3-latest-Linux-x86_64.sh输入回车下拉,接受许可,输入:yes,回车默认固定安装目录/home/robot/miniconda3,直接回车输入yes初始化生效sourc...
这是一般的软件设置流程,不同平台略有不同。有关Jetson Orin、ROG Ally X和Steam Deck等特定平台的额外设置,请参阅相应部分。设置Repo 运行以下命令来克隆repo:mkdir ~/projectscd ~/projectsgit clone git@github.com:hshi74/toddlerbot.git...
2025-04-07 /
123 次浏览 /
人形机器人
欢迎加入ToddlerBot大家庭!本指南将逐步指导您完成整个构建过程。每个阶段都包含详细的说明,以确保顺利组装。你准备好让你的ToddlerBot焕发生机了吗?让我们一起动手,打造一些令人惊叹的东西吧!寻找零件第一步?准备好装备!在开始组装之前,您需要将所有必需的组件放入购物车中。确保材料清单和PCB采购部分包含所有材料,这样您就可以毫不拖延地组装ToddlerBot。我们强烈建议您采取以下措施来简化您的构建过程:1.先订购PCB:由于PCB从订购到交货通常需要大约10天的...
2025-04-07 /
116 次浏览 /
人形机器人
欢迎!本页总结了设置ToddlerBot软件堆栈应遵循的流程。每个步骤都有指向详细说明的链接。你的笔记本电脑或工作站典型的工作流程包括在模拟工作时在笔记本电脑或工作站上开发代码,然后通过在Jetson Orin上运行它将其部署到ToddlerBot。例如,我在笔记本电脑上开发代码,并使用Nomachine远程工具访问Jetson Orin以直接在机器人上执行代码。要设置您的笔记本电脑或工作站,只需按照“设置”部分中的说明进行操作。Jetson Orin Jetson...
2025-04-07 /
120 次浏览 /
人形机器人
在组装手册和组装视频中,我们已经展示了如何校准ToddlerBot的零点。但本节中我们想进一步阐述一些细节。一旦您熟悉了它,校准过程就会变得非常快。1.首先,您需要3D打印校准装置。您可以在MakerWorld中找到校准装置的所有切片板。并在Onshape文档中找到CAD文件。2.插入校准装置时,由于配合紧密,可能会遇到摩擦。固定后,它们应卡入到位,锁定关节。如果关节仍然移动,请检查电缆是否受阻或插入不正确。第一次在校准装置周围布线可能很棘手,但相信我们,这是完全可行的。对于...
2025-04-07 /
120 次浏览 /
人形机器人

![[开源项目]Mobile ALOHA低成本全身远程操作手臂](http://rosrobot.cn/zb_users/upload/2024/01/202401051704450962810480.png)
![[资讯]国内也可以直接采购谷歌与斯坦福联合开发的ALOHA 2双臂协作开源平台了](http://rosrobot.cn/zb_users/upload/2024/02/202402201708422963558886.jpg)