ToddlerBot: 开源仿人机器人平台——低成本、高灵活性的AI学习与操作专家微信公众号文章链接跳转:https://mp.weixin.qq.com/s/6trQtVq4K8USg1XC-Fl6pAToddlerBot是一个开源的、与机器学习兼容的仿人机器人平台,旨在高效地在模拟环境和现实世界中收集大规模、高质量的训练数据。该平台由斯坦福大学的设计团队开发,具备30个自由度(DoFs),支持多种控制策略,如强化学习、模仿学习等,适用于广泛的研究和应用场景。产品亮点低成本...
2025-06-24 /
2518 次浏览 /
人形机器人
Orca Core 是 ORCA Hand 的核心控制包。它用于抽象硬件,提供校准和张紧脚本,并在关节空间中使用简单的高级控制方法来控制机械手。采购链接开始要开始使用 Orca Core,请按照以下步骤操作:下载代码:git clone https://ghfast.top/https://github.com/orcahand/orca_core.git 1.创建虚拟环境(推荐):python3 -m venv venvsource venv/bin/a...
2025-12-24 /
1889 次浏览 /
灵巧手
智能佳—Gello-UR机械臂遥操作—操作引导视频/* 仅针对本页面的局部样式,不影响全局 */
.product-video-container {
max-width: 100%;
margin: 20px 0;
background: #fff;
border-radius: 4px;
overflow: hidden;...
点击跳转项目地址:https://wuphilipp.github.io/gello_site/代码地址:https://github.com/wuphilipp/gello_software...
采购点击跳转:项目网站:https://jasonjzliu.com/factr/代码开源地址:https://github.com/JasonJZLiu/FACTR_Teleop...
要使用虚拟TurtleBot3,请turtlebot3_fake_node.launch.py在一个turtlebot3_fake_node简单的模拟节点包中执行。按照说明使用Fake Node将 TurtleBot3带入虚拟世界。1.执行turtlebot3_fake_node.launch.py文件。使用参数TURTLEBOT3_MODEL指定为您的TurtleBot3模型(burger、waffle、waffle_pi) 。 export TURTLEBOT3_MODE...
这个机器人是一款四轮全向移动的小型机器人,具有高度灵活性和精准的导航能力。它配备了舵轮系统,使其能够在任何方向上平稳移动,包括侧向和斜向,这为其在复杂环境中的运动提供了极大的自由度。主要特性:四轮全向驱动:四个轮子均为舵轮,允许机器人在狭小空间中灵活移动,包括原地旋转和横向平移。六自由度机械臂:配备一个六自由度的机械臂,能够执行复杂的抓取、搬运和操作任务。机械臂的多自由度设计使其可以在三维空间中进行精确的物体操控,适用于多种应用场景。RGB LED灯:机器人上装有4个RGB...
主控制器:NVIDIA JETSON NANO嵌入式控制器:MEGA2560开源控制器尺寸(长宽高):300x300x350mm(不含机械臂高度)运动结构:四颗高精度无刷直流电机转向机构:四颗大扭矩数字舵机运动方式:全向舵轮最大速度:1.5m/s越障能力:≥25mm最大负载:5kg传感器:包含激光雷达、D543i摄像头、9轴IMU、计算模块、车载屏幕等通讯模块:WIFI通讯模块电池:12V 12000Mah大容量电池运行时间:约6小时30分钟充电时间:约4小时30分钟操作系统...
注意:出厂默认系统预装为ubuntu20.04,已经装好所需的ROS以及功能包,不需要重复安装,固件已经刷好,不需要重复刷固件。调试准备:Omnidirectbot、USB鼠标、USB键盘、远程主机Jetson NanoNVIDIA® Jetson Nano™ 开发者套件是一款专为创客、学习者和开发者打造的小型AI计算机。 1-用于主存储器的microSD卡插槽2-40针扩展接头3-用于5V电源输入或设备模式的 Micro-USB 接口4-千...
步骤如下:双击NoMachine客户端,启动NoMachine客户端 添加远程主机打开NoMachine → 点击 “+ Add” 默认Port选择4000,Protocol选择NX 查看机器人IP注意:机器人的IP可以通过查询路由器后台,或者热点设置界面 Name 填写 robot在 Host 中填入 TurtleBot3 的IP,例如:19...
充电接口位置如下:需要12V电源充电器充电器 充电中 充满...
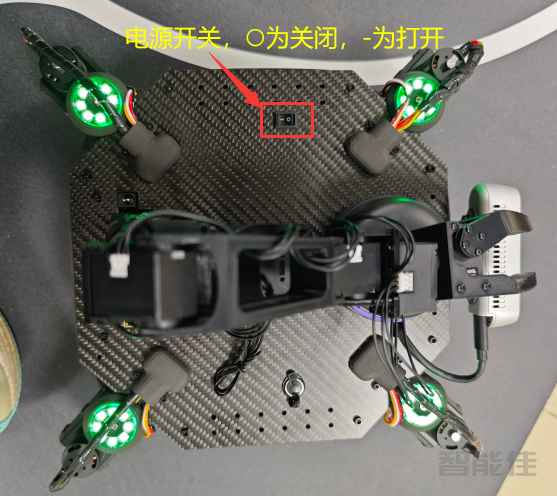
拨动开关至如图所示位置。联网和网络配置为了实现四轮全向舵轮协作机器人与PC之间的通信,要保证四轮机器人与PC端的网络都在一个局域网内。 首先获取四轮车端的IP。点击屏幕上的黑色终端,或者右键,打开一个terminal:输入以下指令:ifconfig 键入命令后回车,即可获取当前四轮车主机的 IP 地址。 同理,获取[Remote PC]的 IP 地址。如上图获取的 Remote PC 的...
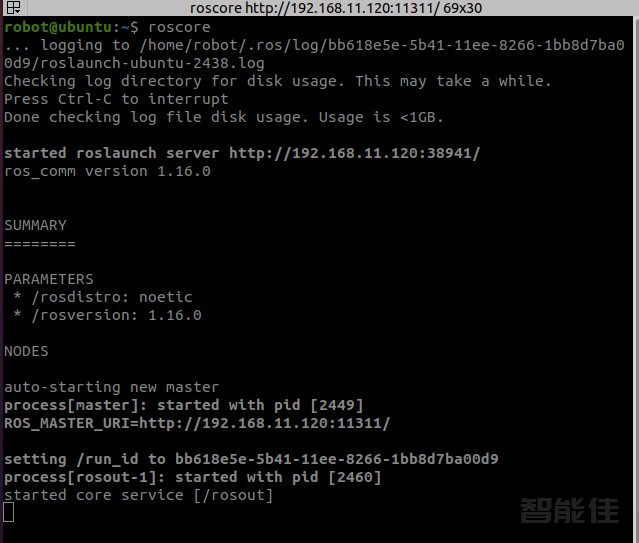
这一节我们来讲omnidirectbot如何启动和使用1.启动主机[远程主机(笔记本电脑)]运行roscore笔记本电脑打开终端(ctrl+Alt+T),输入roscore,如果显示started core service [/rosout] ,则说明roscore打开成功。roscore2.启动omnidirectbot[omnidirectbot启动launch文件运行机器人程序sudo usermod -a -G dialout $USERroslaunch omnid...
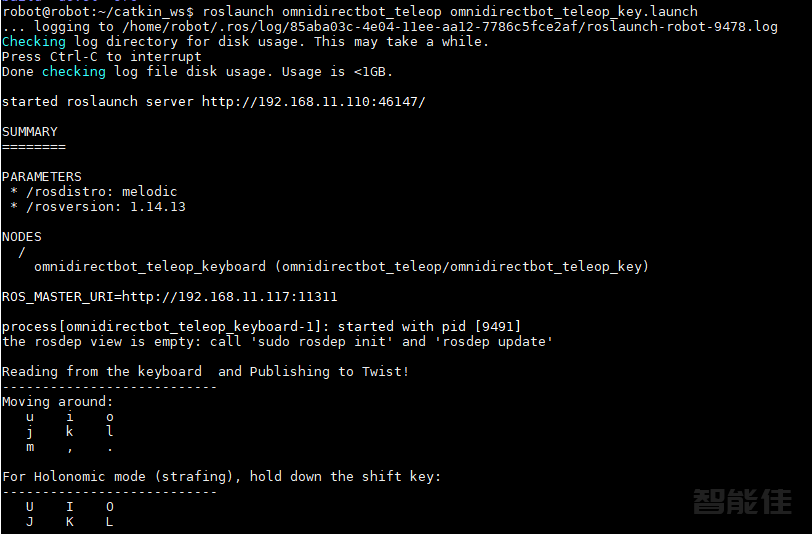
运行键盘控制操作roslaunch omnidirectbot_teleop omnidirectbot_teleop_key.launch或者rosrun teleop_twist_keyboard teleop_twist_keyboard.py接下来就可以通过按照提示控制机器人的前、后、左、右、停动作了。 记住,可以先按下z降低速度到0.1左右,再进行前后左右测试。 [Remote PC] 启动进行简单远程指令操作测试rost...
注意:此教程为单独测试雷达,测试完毕需要关闭view_rplidar.launch[Remote PC]启动roscoreroscore[Turtlebot3]启动雷达(A2M12波特率为256000)注意:启动该选项时候,需要将其他有关雷达的节点全部关掉。sudo usermod -a -G dialout $USERroslaunch rplidar_ros view_rplidar_a2m12.launch ...