WINAVR 编译器安装1.如果尚未安装WINAVR,请安装WINAVR编译器。下载后,直接按照安装步骤下一步、下一步安装即可。安装Java环境下载注意:此处下载的Java是32位版本的Java,下面下载 Eclipse IDE C/C++时,也需要下载32位的版本。安装Eclipse下载Eclipse从浏览器里打开下面网址:https://www.eclipse.org/downloads/packages/release/luna/sr2/eclipse-ide-cc-d...
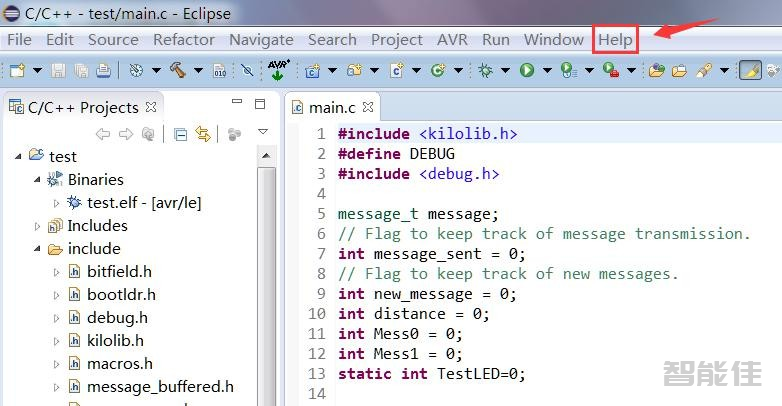
打开 Eclipse,点击 Help ->Install New Software。 在 Work with 后面输入:http://avr-eclipse.sourceforge.net/updatesite/在 AVR Eclipse Plugin 前面打勾。点击“Next”点击“Next”点击“Next”选择“I accept the terms of the license agreement”,点击“Finsh”等待安装即可,重启软件。我这里面显示已...