
ToddlerBot: 开源仿人机器人平台——低成本、高灵活性的AI学习与操作专家微信公众号文章链接跳转:https://mp.weixin.qq.com/s/6trQtVq4K8USg1XC-Fl6pAToddlerBot是一个开源的、与机器学习兼容的仿人机器人平台,旨在高效地在模拟环境和现实世界中收集大规模、高质量的训练数据。该平台由斯坦福大学的设计团队开发,具备30个自由度(DoFs),支持多种控制策略,如强化学习、模仿学习等,适用于广泛的研究和应用场景。产品亮点低成本...
/
2753 次浏览/
人形机器人

Orca Core 是 ORCA Hand 的核心控制包。它用于抽象硬件,提供校准和张紧脚本,并在关节空间中使用简单的高级控制方法来控制机械手。采购链接开始要开始使用 Orca Core,请按照以下步骤操作:下载代码:git clone https://ghfast.top/https://github.com/orcahand/orca_core.git 1.创建虚拟环境(推荐):python3 -m venv venvsource venv/bin/a...
/
2102 次浏览/
灵巧手

智能佳—Gello-UR机械臂遥操作—操作引导视频/* 仅针对本页面的局部样式,不影响全局 */
.product-video-container {
max-width: 100%;
margin: 20px 0;
background: #fff;
border-radius: 4px;
overflow: hidden;...

点击跳转项目地址:https://wuphilipp.github.io/gello_site/代码地址:https://github.com/wuphilipp/gello_software...

采购点击跳转:项目网站:https://jasonjzliu.com/factr/代码开源地址:https://github.com/JasonJZLiu/FACTR_Teleop...

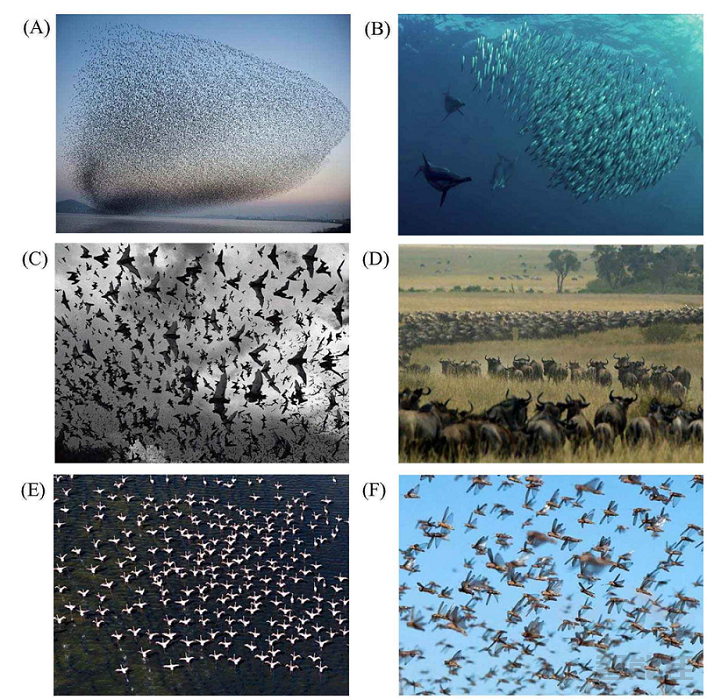
在机器人领域,传统方法通常涉及设计能够精确执行特定任务的单一、高度复杂的机器人。然而,近年来出现了一种变革性范式,催生了机器人群体智能这个令人着迷的领域。受到在昆虫群落和鸟群等自然系统中观察到的集体行为的启发,机器人群体智能利用大群相对简单且分散的机器人的力量,通过协作来实现复杂的目标。群体智能的本质在于这些机器人作为一个统一实体进行通信、协调和适应的能力,表现出超越单个单元能力的集体智能。这种方法的灵感来自于大自然通过简单代理的协作解决复杂问题的能力,每个代理都遵循基于有限...
/
1776 次浏览/
群体智能

什么是集中式控制机器人群体智能中的集中控制是指一种系统架构,其中单个中央实体负责做出决策并协调群体中所有单个机器人的行动。在这种设置中,中央控制器完全了解群体的状态,并且可以基于手头任务的全局视角向每个机器人发出命令。机器人群体智能集中控制的关键特征包括:全局决策:中央控制器可以访问群体中所有单个机器人的信息。它可以分析系统的整体状态并做出考虑集体利益或全员目标实现的决策。通信:中央控制器和各个机器人之间的通信对于传达指令和收集信息至关重要。这可以通过无线通信或其他数据交换方...
/
1862 次浏览/
群体智能

机器人集群分布式控制是指一组机器人(称为集群)通过分散控制和通信来协作执行任务的系统架构。在这种设置中,集群中的每个机器人都自主运行,根据本地信息做出决策并与其直接邻居进行交互。集体行为源于各个机器人之间的互动和合作,使它们能够作为一个群体完成复杂的任务。 机器人集群分布式控制的主要特点包括:分散决策:集群中的每个机器人都有自己的传感器和处理能力,使其能够独立做出决策。去中心化决策意味着没有任何一个机器人或中央实体决定整个集群的行为。本地通信:机器人通过本地交互相互...
/
1713 次浏览/
群体智能
群体行为是指一群机器人通过分散和自组织的交互共同努力实现共同目标所表现出的集体行为。这个概念的灵感来自于自然系统中观察到的集体行为,例如昆虫群、鸟群和鱼群。机器人群体智能背景下群体行为的关键特征包括:去中心化:集群中的机器人具有高度的自主性。每个机器人都遵循基于本地信息以及与附近机器人交互的简单规则,而不依赖中央控制器来指示它们的动作。本地通信:机器人在本地级别上相互通信,共享有关其状态、环境或任务的信息。这种本地通信对于协调群体内的行动至关重要。涌现属性:群体的整体行为是由...
/
1549 次浏览/
群体智能

准确定位机器人对于各种应用至关重要,为此可以采用不同的技术。常见的方法包括:全球定位系统(GPS):对于室外环境,GPS是广泛使用的机器人定位技术。机器人上的 GPS 接收器可以与卫星通信以确定机器人的位置。惯性测量单元 (IMU): IMU 使用加速计和陀螺仪来测量速度和方向的变化,帮助估计机器人的位置和航向。它们通常与其他传感器结合使用以提高准确性。编码器:车轮编码器测量车轮的旋转,并与车轮尺寸的信息相结合,使机器人能够估计其行驶距离,从而估计其位置。计算机视觉:相机和图...
/
1336 次浏览/
群体智能