
ToddlerBot: 开源仿人机器人平台——低成本、高灵活性的AI学习与操作专家微信公众号文章链接跳转:https://mp.weixin.qq.com/s/6trQtVq4K8USg1XC-Fl6pAToddlerBot是一个开源的、与机器学习兼容的仿人机器人平台,旨在高效地在模拟环境和现实世界中收集大规模、高质量的训练数据。该平台由斯坦福大学的设计团队开发,具备30个自由度(DoFs),支持多种控制策略,如强化学习、模仿学习等,适用于广泛的研究和应用场景。产品亮点低成本...
/
2753 次浏览/
人形机器人

Orca Core 是 ORCA Hand 的核心控制包。它用于抽象硬件,提供校准和张紧脚本,并在关节空间中使用简单的高级控制方法来控制机械手。采购链接开始要开始使用 Orca Core,请按照以下步骤操作:下载代码:git clone https://ghfast.top/https://github.com/orcahand/orca_core.git 1.创建虚拟环境(推荐):python3 -m venv venvsource venv/bin/a...
/
2102 次浏览/
灵巧手

智能佳—Gello-UR机械臂遥操作—操作引导视频/* 仅针对本页面的局部样式,不影响全局 */
.product-video-container {
max-width: 100%;
margin: 20px 0;
background: #fff;
border-radius: 4px;
overflow: hidden;...

点击跳转项目地址:https://wuphilipp.github.io/gello_site/代码地址:https://github.com/wuphilipp/gello_software...

采购点击跳转:项目网站:https://jasonjzliu.com/factr/代码开源地址:https://github.com/JasonJZLiu/FACTR_Teleop...
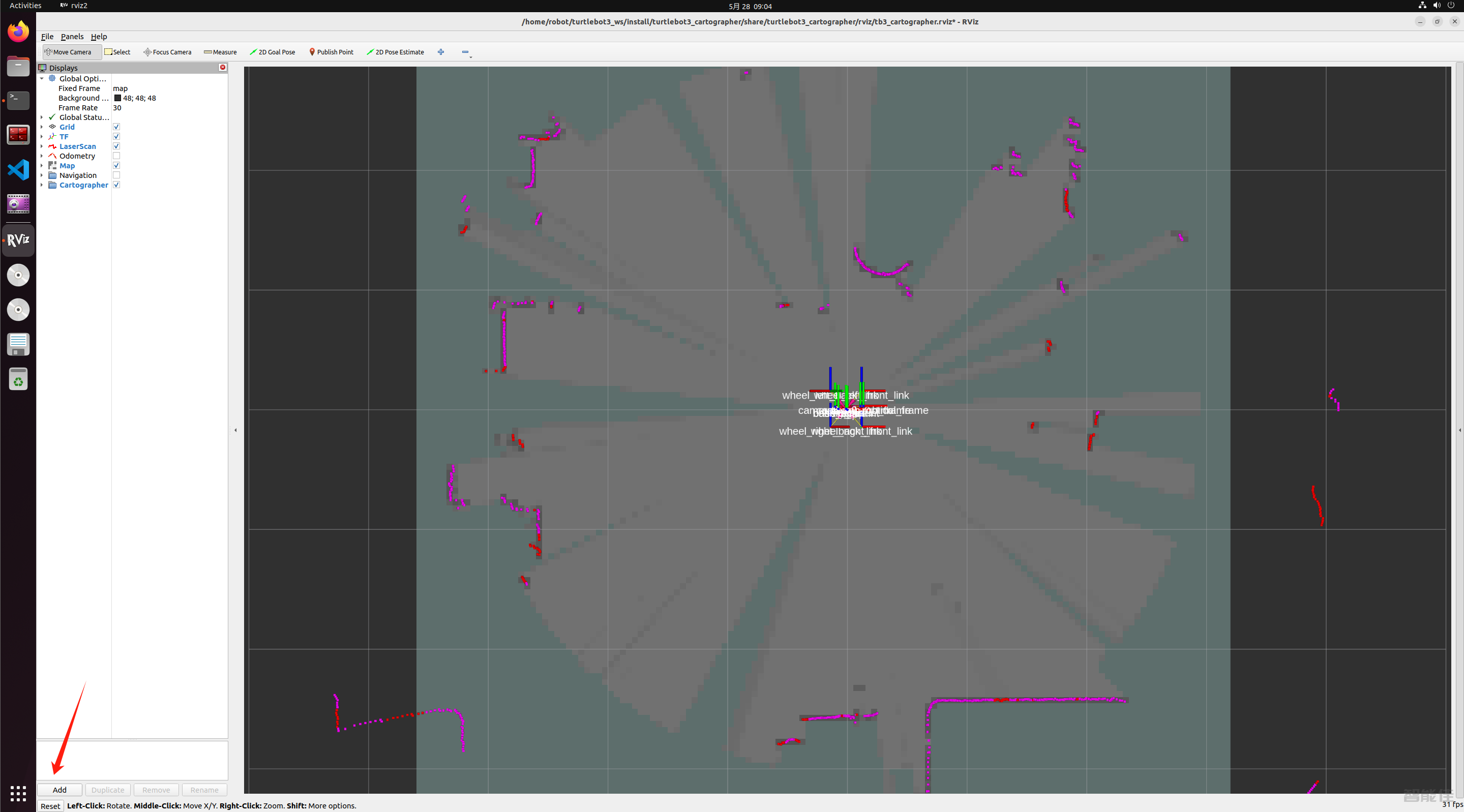
启动TurtleBot3(之前启动过了就不用重复启动)ros2 launch turtlebot3_bringup robot.launch.py 使用ROS2启动相机:ros2 launch realsense2_camera rs_launch.py 输入以下指令:ros2 launch turtlebot3_cartographer cartographer.launch.py ...
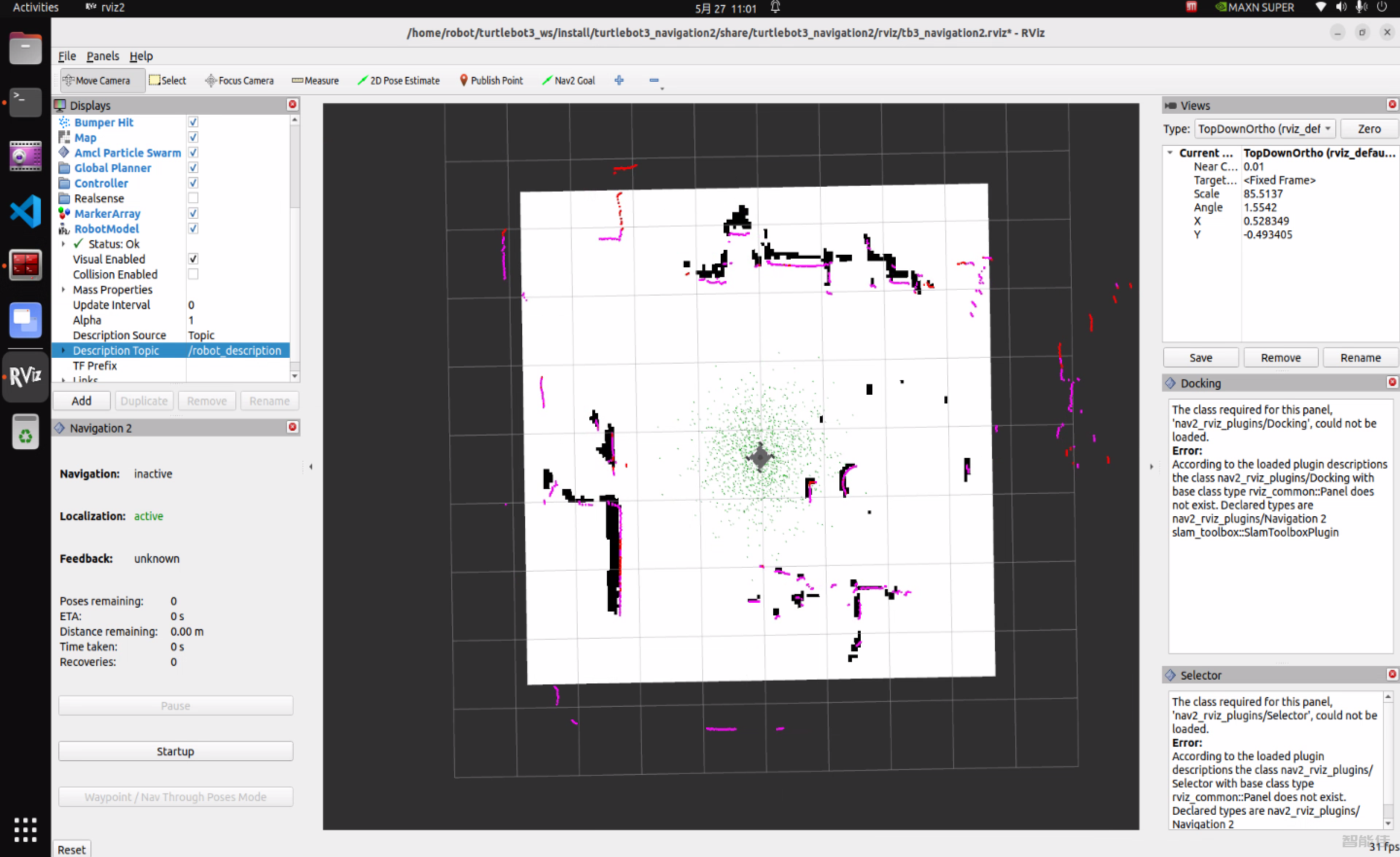
启动TurtleBot3(之前启动过了就不用重复启动)ros2 launch turtlebot3_bringup robot.launch.py 使用ROS2启动相机:ros2 launch realsense2_camera rs_launch.py 输入以下指令,启动导航ros2 launch turtlebot3_navigation2 navigation2.launch.py map:=$HOME/map.yaml 在运行导航之前,必须进行初始姿态估计,...
该系列文章介绍如何在ros2环境下使用turtelbot3,完成基本控制移动,建图,导航等功能。测试环境:Ubuntu20.04 + ros2 foxy...
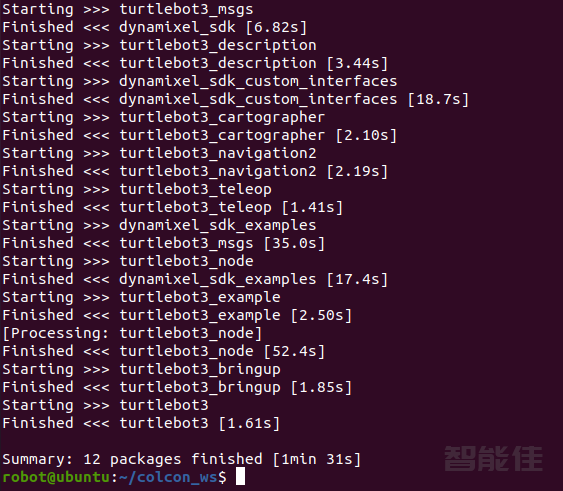
mkdir -p ~/colcon_ws/srccd ~/colcon_ws/src/git clone -b foxy-devel https://github.com/ROBOTIS-GIT/DynamixelSDK.gitgit clone -b foxy-devel https://github.com/ROBOTIS-GIT/turtlebot3_msgs.gitgit clone -b foxy-devel https://github.com/ROBO...
下载仿真包cd ~/colcon_ws/src/安装git clone -b foxy-devel https://github.com/ROBOTIS-GIT/turtlebot3_simulations.git编译cd ..colcon build --symlink-install启动Fake Noderos2 launch turtlebot3_fake_node turtlebot3_fake_node.launch.py启动后弹出rviz,并显示小车模型启动键盘控...
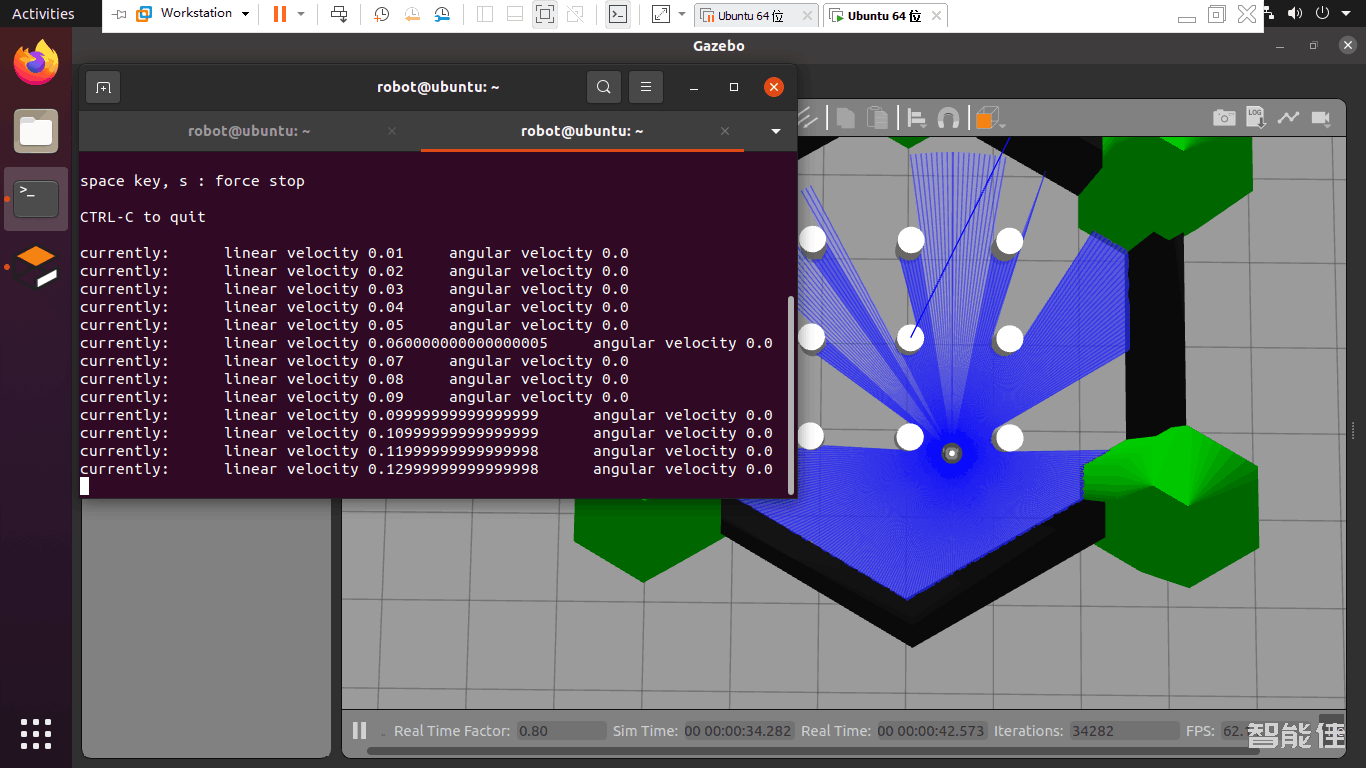
新开终端,启动gezeboros2 launch turtlebot3_gazebo turtlebot3_world.launch.py启动键盘控制ros2 run turtlebot3_teleop teleop_keyboard...
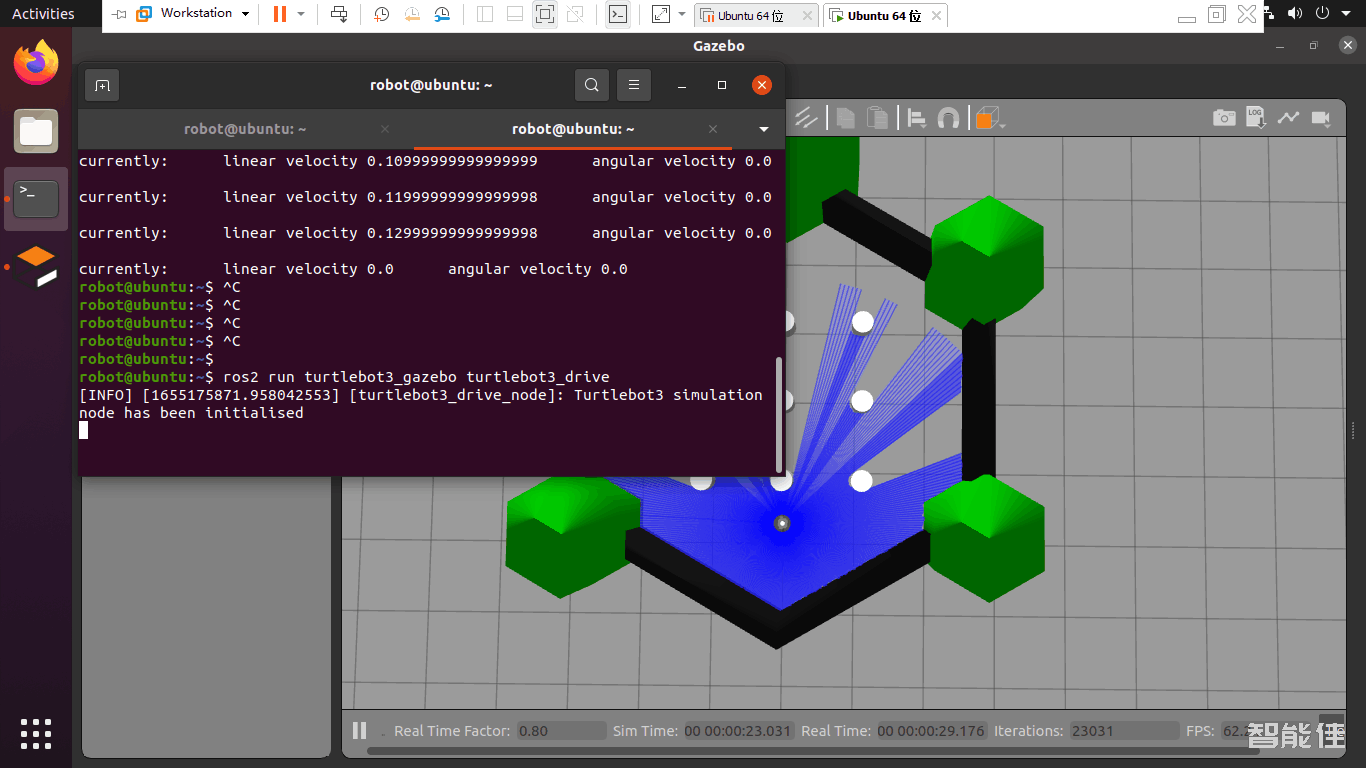
新开终端,启动gazeboros2 launch turtlebot3_gazebo turtlebot3_world.launch.py新开终端,执行自走避障程序ros2 run turtlebot3_gazebo turtlebot3_drive效果如下:...
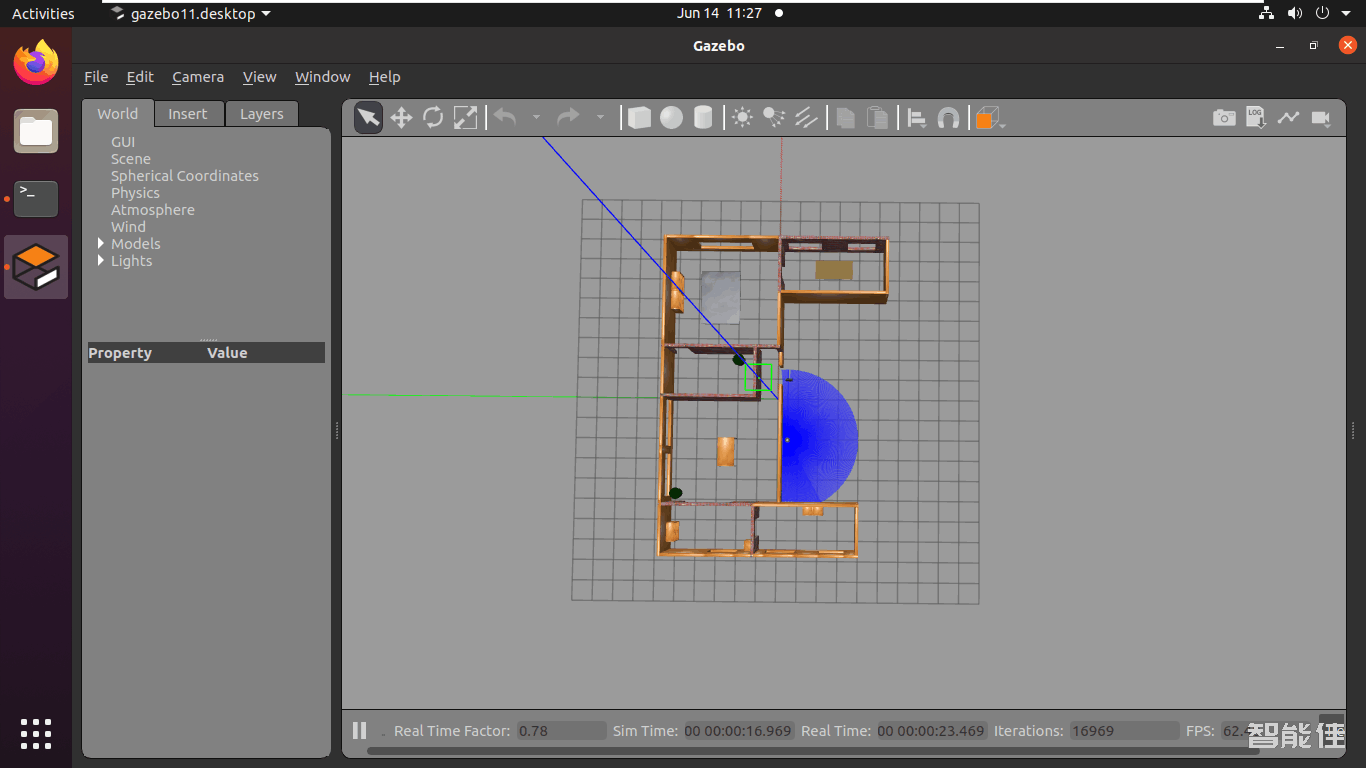
新开终端,启动gezebo,并带有house地图ros2 launch turtlebot3_gazebo turtlebot3_house.launch.py效果如下:...
启动gazeboros2 launch turtlebot3_gazebo turtlebot3_house.launch.py启动rviz2ros2 launch turtlebot3_bringup rviz2.launch.py效果如下:...
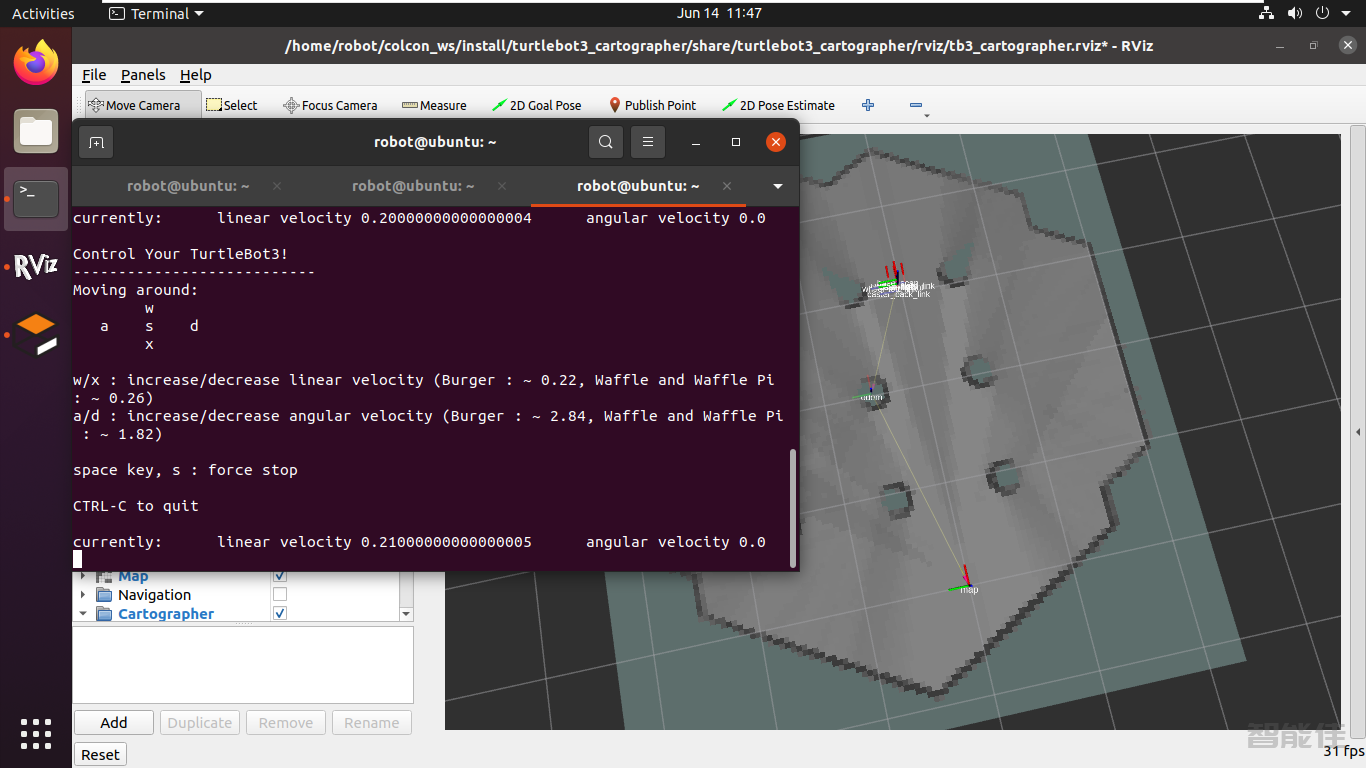
新开终端,运行gazeboros2 launch turtlebot3_gazebo turtlebot3_world.launch.py新开终端,运行建图ros2 launch turtlebot3_cartographer cartographer.launch.py use_sim_time:=True新开终端,启动键盘ros2 run turtlebot3_teleop teleop_keyboard控制小车随机移动,并进行建图,并查看建立的地图,差不多后,保存地图。...