
ToddlerBot: 开源仿人机器人平台——低成本、高灵活性的AI学习与操作专家微信公众号文章链接跳转:https://mp.weixin.qq.com/s/6trQtVq4K8USg1XC-Fl6pAToddlerBot是一个开源的、与机器学习兼容的仿人机器人平台,旨在高效地在模拟环境和现实世界中收集大规模、高质量的训练数据。该平台由斯坦福大学的设计团队开发,具备30个自由度(DoFs),支持多种控制策略,如强化学习、模仿学习等,适用于广泛的研究和应用场景。产品亮点低成本...
/
2753 次浏览/
人形机器人

Orca Core 是 ORCA Hand 的核心控制包。它用于抽象硬件,提供校准和张紧脚本,并在关节空间中使用简单的高级控制方法来控制机械手。采购链接开始要开始使用 Orca Core,请按照以下步骤操作:下载代码:git clone https://ghfast.top/https://github.com/orcahand/orca_core.git 1.创建虚拟环境(推荐):python3 -m venv venvsource venv/bin/a...
/
2103 次浏览/
灵巧手

智能佳—Gello-UR机械臂遥操作—操作引导视频/* 仅针对本页面的局部样式,不影响全局 */
.product-video-container {
max-width: 100%;
margin: 20px 0;
background: #fff;
border-radius: 4px;
overflow: hidden;...

点击跳转项目地址:https://wuphilipp.github.io/gello_site/代码地址:https://github.com/wuphilipp/gello_software...

采购点击跳转:项目网站:https://jasonjzliu.com/factr/代码开源地址:https://github.com/JasonJZLiu/FACTR_Teleop...

启动realsense-viewerrealsense-viewer 关闭realsense-viewer使用ROS2启动相机:ros2 launch realsense2_camera rs_launch.py 新开一个终端,使用如下指令查看话题:ros2 topic list通过rqt_image_view查看ros2 run rqt_image_view rqt_image_view 点击刷新图标 topic选择/camera/c...

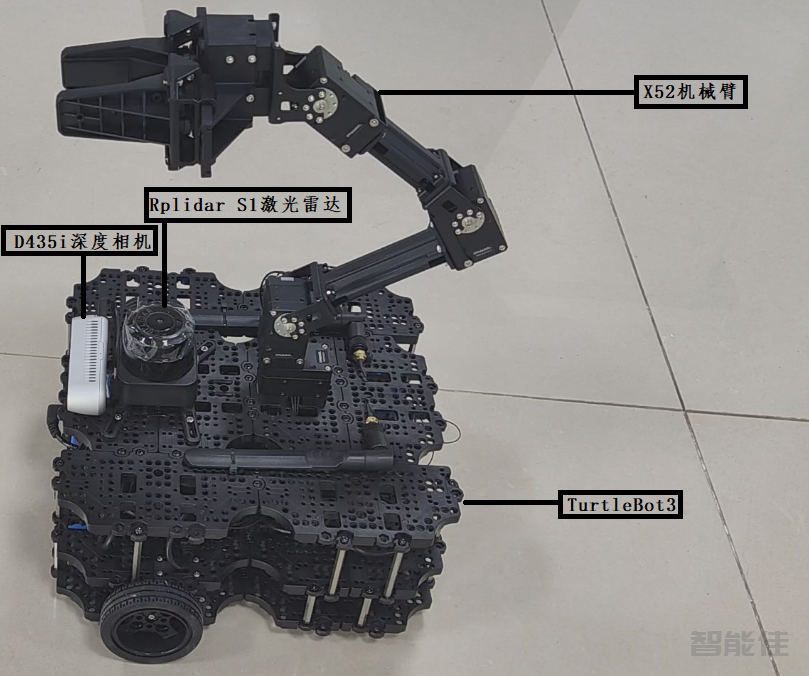
ROBOTIS 的 OpenMANIPULATOR-X 是一款低成本机械手,使用 DYNAMIXEL 执行器,配有 3D 可打印部件并支持 ROS。OpenMANIPULATOR-X 与 TurtleBot3 Waffle 兼容,并mobile manipulator具有 TurtleBot3 平台不可或缺的 SLAM 和导航功能。...

注意:TurtleBot3 Manipulation for ROS2 Humble 需要该turtlebot3_manipulation软件包。请按照以下说明安装所需的软件包及其依赖项。TurtleBot3 模拟包需要 turtlebot3 和 turtlebot3_msgs 两个软件包。如果没有这些必备软件包,TurtleBot3 机械手将无法启动。如果您未安装所需软件包和依赖软件包,请按照快速入门指南中的说明进行操作。1. 使用以下 ssh 命令连接到Turt...

CAD 文件(TurtleBot3 Waffle Pi + OpenMANIPULATOR) 1. 拆下LDS-01或LDS-02激光雷达传感器并将其安装在 TurtleBot3 的正面。红色圆圈表示推荐的螺栓孔。2. OpenMANIPULATOR-X在 TurtleBot3 上安装。黄色圆圈表示建议的螺栓孔。 ...
注意:要使用 OpenMANIPULATOR-X,您需要使用shell 脚本或Arduino IDE将特定固件上传到 OpenCR 。1. 建议使用Shell 脚本上传固件,因为它使用预先构建的二进制文件2. Arduino IDE从提供的源代码构建并上传生成的二进制文件。OpenCR Arduino 开发板管理器不支持基于 ARM 的处理器,例如 Raspberry Pi 或 Jetson Nano。警告:在上传 OpenCR 固件之前,请将所有 DYN...
要使用 Gazebo 运行 TurtleBot3 操控模拟,请跳至“模拟”部分。以下命令将启动实际的 TurtleBot3 硬件,并在其上安装 OpenMANIPULATOR-X。从TurtleBot3 SBC打开一个终端。使用以下命令启动 TurtleBot3 Manipulation。[TurtleBot3 单板电脑]ros2 launch turtlebot3_manipulation_bringup hardware.launch.py危险请注意机器人关节之间的夹伤危...

请注意,实际硬件操作需要TurtleBot3 SBC 的Bringup 使用以下命令启动 TurtleBot3 Manipulation。[TurtleBot3 SBC]ros2 launch turtlebot3_manipulation_bringup hardware.launch.py然后在单独的终端窗口启动伺服服务器节点和遥控节点。[远程 PC]ros2 launch turtlebot3_manipulation_moveit_config servo.launc...

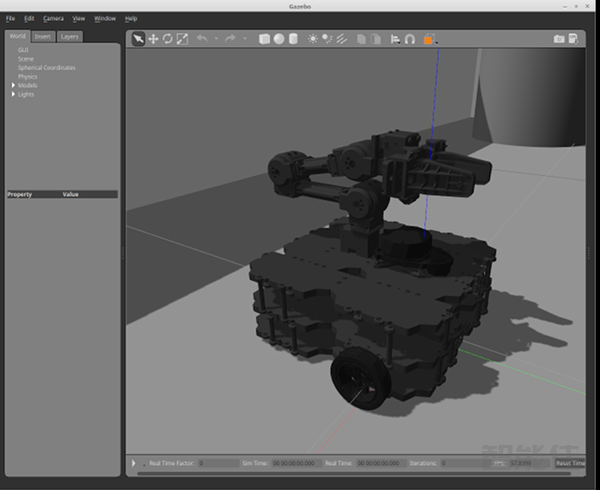
按照以下说明使用 Gazebo 模拟 TurtleBot3 操作。安装模拟包安装用于 TurtleBot3 Manipulation Gazebo 模拟的软件包。[远程 PC]cd ~/turtlebot3_ws/src/git clone -b humble https://ghfast.top/https://github.com/ROBOTIS-GIT/turtlebot3_simulations.gitcd ~/turtlebot3_ws && col...

为了使用 MoveIt 在 Gazebo 中操作 OpenMANIPULATOR-X,请先终止其他 Gazebo 和 RViz 工具。输入以下命令启动带有 MoveIt 配置的 RViz。[远程 PC]ros2 launch turtlebot3_manipulation_moveit_config moveit_gazebo.launch.pyRViz 上的 MoveIt 界面将与 Gazebo 模拟器一起推出。...

在使用以下指令之前,请务必阅读SLAM手册。TurtleBot3 启动启动 TurtleBot3 ManipulationActual或Simulation使用以下命令。真实设备[TurtleBot3 SBC]ros2 launch turtlebot3_manipulation_bringup hardware.launch.py或Simulation [远程 PC]ros2 launch turtlebot3_manipulation_gazebo gazebo...