ToddlerBot: 开源仿人机器人平台——低成本、高灵活性的AI学习与操作专家微信公众号文章链接跳转:https://mp.weixin.qq.com/s/6trQtVq4K8USg1XC-Fl6pAToddlerBot是一个开源的、与机器学习兼容的仿人机器人平台,旨在高效地在模拟环境和现实世界中收集大规模、高质量的训练数据。该平台由斯坦福大学的设计团队开发,具备30个自由度(DoFs),支持多种控制策略,如强化学习、模仿学习等,适用于广泛的研究和应用场景。产品亮点低成本...
2025-06-24 /
2756 次浏览 /
人形机器人
Orca Core 是 ORCA Hand 的核心控制包。它用于抽象硬件,提供校准和张紧脚本,并在关节空间中使用简单的高级控制方法来控制机械手。采购链接开始要开始使用 Orca Core,请按照以下步骤操作:下载代码:git clone https://ghfast.top/https://github.com/orcahand/orca_core.git 1.创建虚拟环境(推荐):python3 -m venv venvsource venv/bin/a...
2025-12-24 /
2110 次浏览 /
灵巧手
智能佳—Gello-UR机械臂遥操作—操作引导视频/* 仅针对本页面的局部样式,不影响全局 */
.product-video-container {
max-width: 100%;
margin: 20px 0;
background: #fff;
border-radius: 4px;
overflow: hidden;...
点击跳转项目地址:https://wuphilipp.github.io/gello_site/代码地址:https://github.com/wuphilipp/gello_software...
采购点击跳转:项目网站:https://jasonjzliu.com/factr/代码开源地址:https://github.com/JasonJZLiu/FACTR_Teleop...
开机1. 将机器人置于支架上2. 安装电池包² 将电池插入机器人电池槽,有指示灯的在上部3. 机器人双手双脚自然垂直摆放4. 长按开机按钮3s(灯亮后松开,长按超6s会关机),机器人开机,开机后机器人等待约一分钟后,机器人播放提示音,此时机器人可以被遥控,期间机器人需要保持静止,以初始化IMU 5. 使用遥控器 RT+Y 进入准备模式,此时机器人可以落地,应注意摆放让机器人处于站姿,站在地面上。6. 使用 RT+A 进入行走模式,此时可以开始控制机器人行走...
2025-09-26 /
801 次浏览 /
人形机器人
手柄键位请注意,不同软件版本的遥控器键位有区别,请在 "查看版本" 章节确认当前机器人的软件版本使用 XBOX 标准手柄,使用前请确认手柄控制模式为接收器模式,工作模式为三个灯常亮。 按键对照表按键功能前置条件生效版本(未标注则所有版本生效)LT + BACK(减)阻尼模式>= v1.0.6RT + X阻尼模式< v1.0.6RT + Y准备模式(手脚关节不能掰动后,机器人搬离支架)RT + A行走模式准备模式下左摇杆行走控制行走模式...
2025-09-26 /
840 次浏览 /
人形机器人
说明:Booster 机器人可以连接上手机 APP 实现对机器人的控制,获取状态反馈,蓝牙配网等功能安卓下载地址iOS APP 安装操作流程1. 使用苹果自带相机扫描二维码 2. 跳转网页后点击「在 App Store 中查看」 3. 跳转至 App Store 后,下载 TestFlight 4. 下载后打开 TestFlight,允许使用无线数据 5. 当出现此类情况时,后台关闭 TestFlight 并重新打开即可 6....
2025-09-26 /
718 次浏览 /
人形机器人
v1.2.0.8 版本,Booster 机器人接入了豆包实时语音对话功能,可通过遥控器按键(LB + RB + UP)开启和关闭实时语音对话功能使用流程- LB + RB + UP 按下后请稍等一会儿,直到听到语音播报:“你好,我是 Booster T1,有什么可以帮你的吗?”,说明实时语音对话功能已启动,接下来可以和机器人进行对话- 实时语音对话开启之后,机器人会自动转动头部,看向面前最近的人脸- 实时语音对话开启状态下,同时按下 LB + LT + A,机器人会...
2025-09-26 /
852 次浏览 /
人形机器人
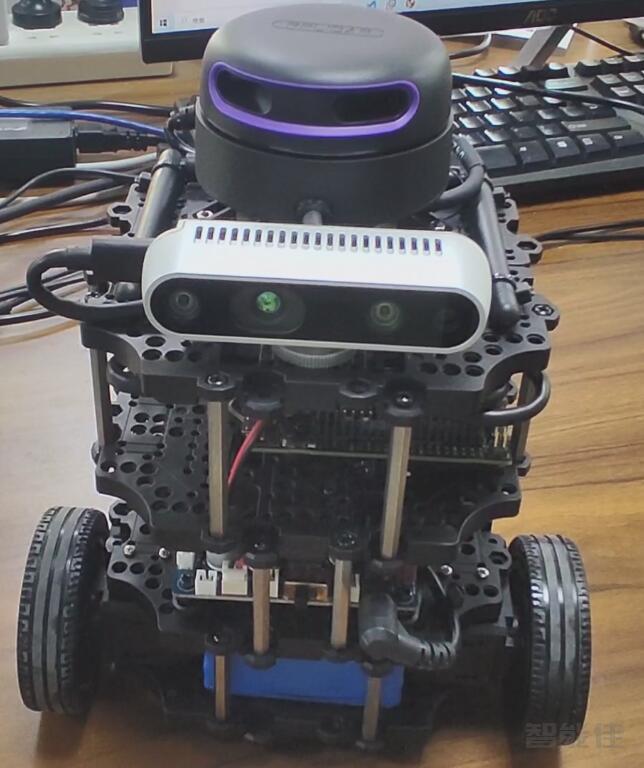
Burger Pro(ONAD)是Burger(参考TurtleBot3介绍)的升级版,预装ROS2(Humble)操作系统,主要区别是主处理器由树莓派4B更换为Jetson orin Nano(8G版本),增加了GPU处理能力,雷达由LDS-02升级为A2M12,检测距离更远,采样频率更高,并增加了深度相机D435i,增加了深度视觉处理功能。并配备了12000mA大容量锂电池,容量是标准版电池的6倍,续航更持久。采购...
Orin NanoJetson Orin Nano是英伟达全新一代的产品,8GB版本核心模组算力40TOPS,性能是Jetson Nano B01的80倍,是一款功能强大的人工智能(AI)开发板,可为边缘系统提供强大的计算机性能。借助高达40TOPS 的加速计算能力,它可以并行运行现代神经网络并处理来自多个高分辨率传感器的数据,足以满足一个完整AI系统的需求,支持所有通用的AI框架。A2M12低成本360度激光扫描测距雷达新一代低成本二维激光雷达(LIDAR),它具有每秒高达...
PC设置警告:本章内容用于初始化 Remote PC 将用于控制TurtleBot3的(台式机或笔记本电脑)。请勿在TurtleBot3平台本身上完成这些说明。 注:此指令已在Ubuntu 22.04运行的Linux发行版上进行了测试 ROS2 Humble Hawksbill 。 在远程PC上下载并安装Ubuntu从下面的链接下载适用于您电脑的Ubuntu 22.04 LTS Desktop 镜像。 Ub...
注意:此功能一般出厂下载完毕,无需重复操作。工具下载sudo dpkg --add-architecture armhf sudo apt-get update sudo apt-get install libc6:armhf -y wget https://ghfast.top/https://github.com/ROBOTIS-GIT/OpenCR-Binaries/raw/master/turtlebot3/ROS2/lat...
使用Ctrl+Alt+T在远程PC上打开一个新终端调出基本软件包以启动必要的TurtleBot3应用程序。您需要指定特定的 TurtleBot3模型。[TurtleBot3 SBC]export TURTLEBOT3_MODEL=burgerros2 launch turtlebot3_bringup robot.launch.py 当TURTLEBOT3_MODEL设置为burger时,终端输出将类似于下面的输出:[TurtleBot3 SBC]export TU...
遥控操作TurtleBot3可通过遥控器进行遥控。请确保您的SBC和ROS版本支持必要的ROS软件包。警告:在进行远程操作之前,请确保在TurtleBot3 SBC上运行Bringup。此外,在桌子上测试机器人时要小心,因为机器人可能会驶出边缘。键盘在远程PC上打开一个终端。运行远程操作节点。如果TURTLEBOT3_MODEL参数未预定义,则将${TB3_MODEL}替换为burger或waffle或waffle_pi。 [远程PC]export TURTLEBOT3_MO...