ToddlerBot: 开源仿人机器人平台——低成本、高灵活性的AI学习与操作专家微信公众号文章链接跳转:https://mp.weixin.qq.com/s/6trQtVq4K8USg1XC-Fl6pAToddlerBot是一个开源的、与机器学习兼容的仿人机器人平台,旨在高效地在模拟环境和现实世界中收集大规模、高质量的训练数据。该平台由斯坦福大学的设计团队开发,具备30个自由度(DoFs),支持多种控制策略,如强化学习、模仿学习等,适用于广泛的研究和应用场景。产品亮点低成本...
2025-06-24 /
2761 次浏览 /
人形机器人
Orca Core 是 ORCA Hand 的核心控制包。它用于抽象硬件,提供校准和张紧脚本,并在关节空间中使用简单的高级控制方法来控制机械手。采购链接开始要开始使用 Orca Core,请按照以下步骤操作:下载代码:git clone https://ghfast.top/https://github.com/orcahand/orca_core.git 1.创建虚拟环境(推荐):python3 -m venv venvsource venv/bin/a...
2025-12-24 /
2116 次浏览 /
灵巧手
智能佳—Gello-UR机械臂遥操作—操作引导视频/* 仅针对本页面的局部样式,不影响全局 */
.product-video-container {
max-width: 100%;
margin: 20px 0;
background: #fff;
border-radius: 4px;
overflow: hidden;...
点击跳转项目地址:https://wuphilipp.github.io/gello_site/代码地址:https://github.com/wuphilipp/gello_software...
采购点击跳转:项目网站:https://jasonjzliu.com/factr/代码开源地址:https://github.com/JasonJZLiu/FACTR_Teleop...
概念Xacro是XML Macros的缩写,Xacro是一种 XML宏语言,是可编程的XML。原理Xacro 可以声明变量,可以通过数学运算求解,使用流程控制控制执行顺序,还可以通过类似函数的实现,封装固定的逻辑,将逻辑中需要的可变的数据以参数的方式暴露出去,从而提高代码复用率以及程序的安全性。作用较之于纯粹的URDF实现,可以编写更安全、精简、易读性更强的机器人模型文件,且可以提高编写效率。...
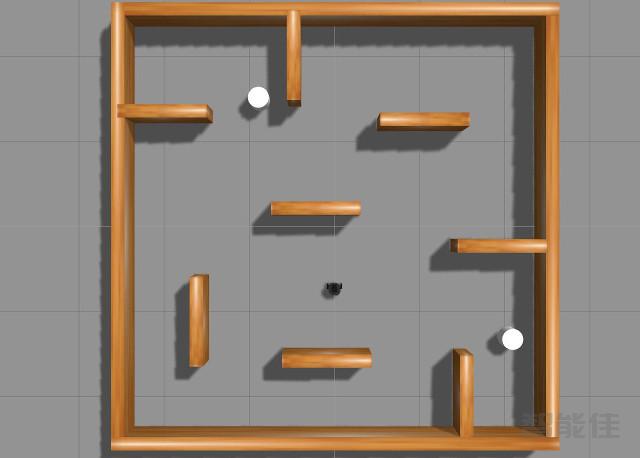
Gazebo是一款3D动态模拟器,用于显示机器人模型并创建仿真环境,能够在复杂的室内和室外环境中准确有效地模拟机器人。与游戏引擎提供高保真度的视觉模拟类似,Gazebo提供高保真度的物理模拟,其提供一整套传感器模型,以及对用户和程序非常友好的交互方式。以“ros- [ROS_DISTRO]-desktop-full”命令安装ROS时,gzebo会默认被安装。运行使用命令gazebo或rosrun gazebo_ros gazebo...
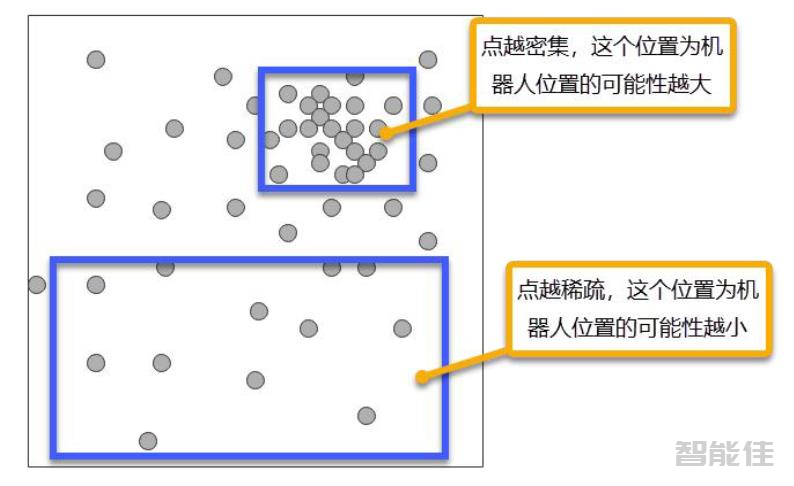
1.AMCL概述AMCL(Adaptive Monte Carlo Localization),即自适应蒙特卡洛定位,是ROS/ROS2系统中最官方的定位模块,是导航模块中唯一指定的算法。它是基于多种蒙特卡洛融合算法在 ROS/ROS2系统中的一种实现。AMCL自适应蒙特卡洛定位是一个关于机器人在二维空间移动的概率定位系统,采用粒子滤波器来跟踪机器人在已知地图中的位姿。2.原理说明构建地图后,为了机器人能够达到一个比较准确的位置,我们需要利用自适应蒙特卡洛定位对机器人位置进行...
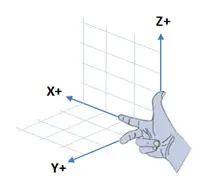
坐标轴的定义三维坐标轴朝向定义常规用来表示三维位置关系时,使用的是右手坐标系,何为右手坐标系呢?我们来看下图:右手坐标系定义把右手放在原点的位置,使大姆指,食指和中指互成直角,把大姆指指向Z轴的正方向,食指指向X轴的正方向时向时,中指所指的方向就是Y轴的正方向。通常相对于我们的身体而言X->朝前Y->朝左Z->朝上举例:坐标点(3,4,5)表示距原点前3个单位 ,并向左4个单位以及向上5个单位的位置。三维坐标轴旋转定义有了三维坐标轴的定义,那么对于旋转的定义...
Burger Pro(NAD)是Burger(参考TurtleBot3介绍)的升级版,主要区别是主处理器由树莓派4B更换为Jetson Nano,增加了GPU处理能力,雷达由LDS-02升级为A2M12,检测距离更远,采样频率更高,并增加了深度相机D435i,增加了深度视觉处理功能。并配备了12000mA大容量锂电池,容量是标准版电池的6倍,续航更持久。采购...
Jetson NanoNVIDIA® Jetson Nano™ 开发者套件是一款专为创客、学习者和开发者打造的小型AI计算机。 1-用于主存储器的microSD卡插槽 2-40针扩展接头 3-用于5...
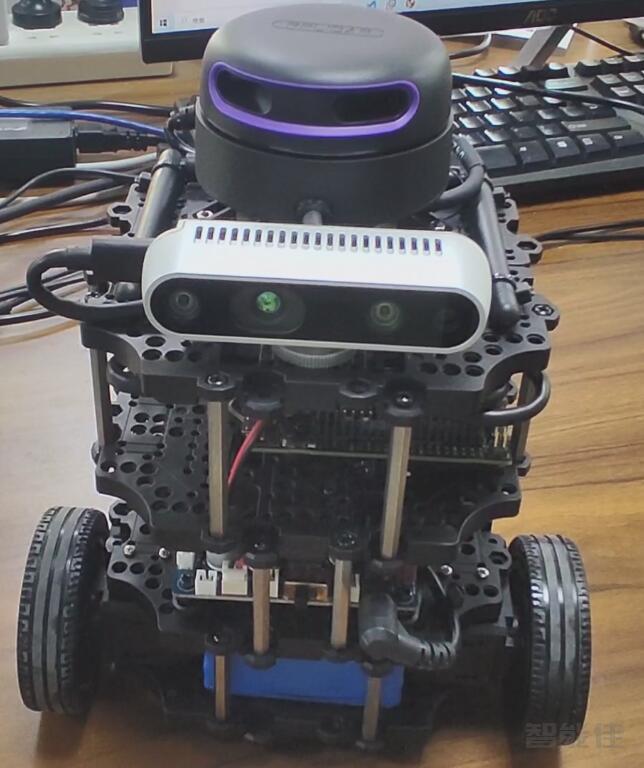
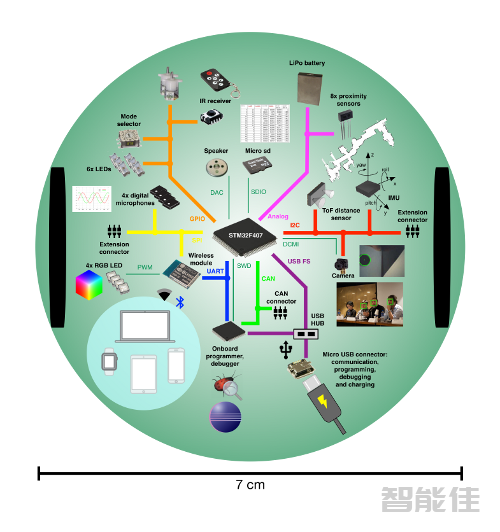
硬件框架图下图显示了 e-puck2 机器人提供的主要组件以及它们的物理放置位置:...
类目E-puck 2尺寸/重量直径70mm,高度45mm,130g电池续航锂电池 1800mAh,支持USB充电,充电时长2.5H处理器32位STM32F407@168 MHz (210 DMIPS), DSP and FPU, DMA存储RAM: 192 KB; Flash: 1024 KB马达2个步进式马达,齿轮比50:1轮子轮径:41mm;轮间距:55mm速度最大1200步/秒 (约15.4cm/秒)机械结构透明塑料机身,支持PCBs,电池和电机距离传感器8个红外传感器...
机器人的主微控制器最初使用固件编程,该固件包括可以根据选择器位置启动的许多演示,这是具有相关位置的演示列表和简短说明:· 选择器位置0:Aseba· 选择器位置1:shell· 选择器位置2:读取接近传感器,当物体接近附近时,打开相应的LED· 选择器位置3:Asercom协议v2(BT)· 选择器位置4:范围和方位扩展(接收器)· 选择器位置5:范围和方位扩展(变送器)· 选择器位置6:利用陀螺仪来回移动...
e-puck2选用的无线电模块是乐鑫的新型ESP32芯片,集成了运行频率高达 240 MHz的双核、4 MB闪存和520 KB RAM。它支持WiFi标准 802.11 b/g/n(支持接入点模式)、蓝牙和蓝牙 LE 4.2。它是 ESP8266芯片的后继产品。下图显示了ESP32上可用的各种外设:该芯片主要负责处理无线通信,此外它还处理RGB LED(带PWM)和用户按钮。由于主微控制器上的引脚数量限制,RGB LEDs和按钮连接到无线电模块。 ...