ToddlerBot: 开源仿人机器人平台——低成本、高灵活性的AI学习与操作专家微信公众号文章链接跳转:https://mp.weixin.qq.com/s/6trQtVq4K8USg1XC-Fl6pAToddlerBot是一个开源的、与机器学习兼容的仿人机器人平台,旨在高效地在模拟环境和现实世界中收集大规模、高质量的训练数据。该平台由斯坦福大学的设计团队开发,具备30个自由度(DoFs),支持多种控制策略,如强化学习、模仿学习等,适用于广泛的研究和应用场景。产品亮点低成本...
2025-06-24 /
2764 次浏览 /
人形机器人
Orca Core 是 ORCA Hand 的核心控制包。它用于抽象硬件,提供校准和张紧脚本,并在关节空间中使用简单的高级控制方法来控制机械手。采购链接开始要开始使用 Orca Core,请按照以下步骤操作:下载代码:git clone https://ghfast.top/https://github.com/orcahand/orca_core.git 1.创建虚拟环境(推荐):python3 -m venv venvsource venv/bin/a...
2025-12-24 /
2116 次浏览 /
灵巧手
智能佳—Gello-UR机械臂遥操作—操作引导视频/* 仅针对本页面的局部样式,不影响全局 */
.product-video-container {
max-width: 100%;
margin: 20px 0;
background: #fff;
border-radius: 4px;
overflow: hidden;...
点击跳转项目地址:https://wuphilipp.github.io/gello_site/代码地址:https://github.com/wuphilipp/gello_software...
采购点击跳转:项目网站:https://jasonjzliu.com/factr/代码开源地址:https://github.com/JasonJZLiu/FACTR_Teleop...
e-puck2是一款迷你移动机器人,自2005年以来(到2018年),e-puck一直是一款非常成功的机器人。大约3000台用于教育和研究。从2018年1月起,版本2可用。版本2有许多改进,仍然保持了大多数场景的兼容性。形状和机械结构相同,但控制器、USB、飞行时间传感器和 WiFi等功能更强大。...
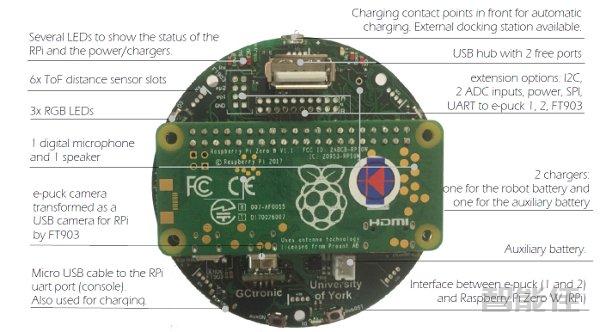
特征:uRaspberry Pi Zero W(rPi)或Zero 2W通过I2C连接到机器人u通过USB接口在机器人基础摄像头和rPi之间建立接口,高达15FPSu1个数字麦克风和1个扬声器uUSB集线器连接到 rPi,带有2个空闲端口uuUSB连接到rPi uart 端口,也可以充电u2个充电器。1个用于机器人电池,1个用于备用电池,位于扩展件的顶部u在前面充电接触点以进行自动充电,提供外部扩展坞u几种扩展选项。6个i2C通道,2个ADC输入u多个LED用来显示rPi和电...
...
树莓派出厂默认键盘模式为德国(瑞士)版本,不符合中国用户使用习惯。需要改为中国默认布局。我们用的键盘布局一般是美国(US)的(104 键);终端输入sudo raspi-config,进入树莓派设置,(注意:没改布局之前“/”代表“-”)sudo raspi-config选择4.Localisation Options Set up launguage and regional settings to match your location选择 I3 Change...
要打开PI-Puck,您需要按下auxON按钮,如下图所示。这也会同时打开机器人(如果尚未打开)。同样,如果您打开机器人,那么扩展板也会自动打开。要关闭Pi-puck,您需要按住auxON按钮2秒钟;这将启动掉电程序。...
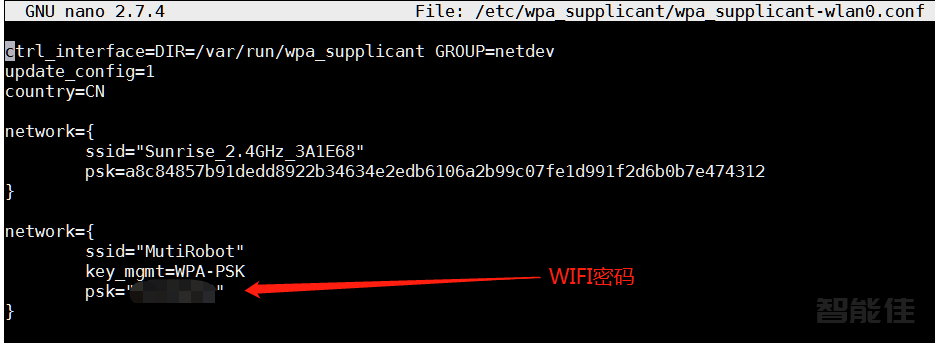
打开WIFI配置文件。sudo nano /etc/wpa_supplicant/wpa_supplicant-wlan0.conf修改国家地区为中国country=CN添加有密码的WIFI网络,格式如下:如果添加的是没有密码的WIFI网络,需要注意将key_mgmt设置为NONEnetwork={ssid="ssid_name" key_mgmt=NONE}按快捷键Ctrl+X,然后输入Y,退出保存。重启。sudo reboot测试:sudo ifcon...
该系统基于Raspberry Pi OS Buster,可以从以下链接下载buster_ros2_21.06.24.tar.gz注意:该系统仅支持ROS2,这是与旧系统(Stretch)的主要区别。所有示例都得到完全支持。...
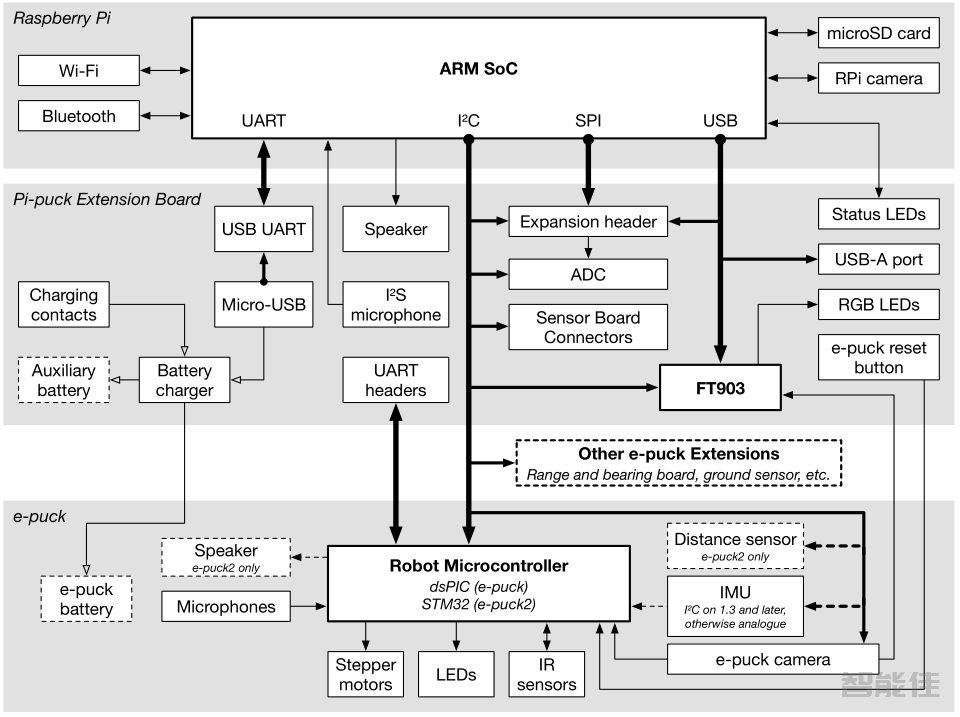
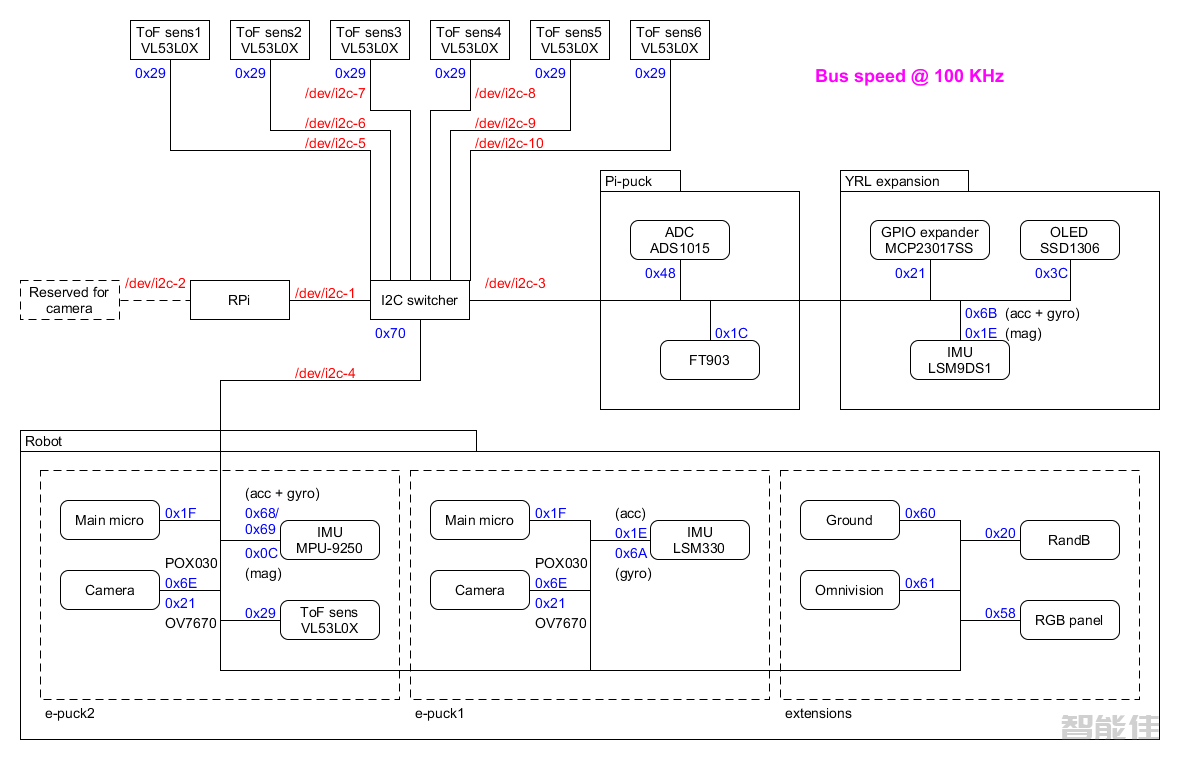
I2C用于让机器人、Pi-puck和扩展中存在的各种元素进行通信。整体架构如下图所示:Pi-puck扩展中包含一个I2C切换器,以支持额外的I2C总线(RPi本身只有一条可用的I2C总线)。这些是为了避免具有固定I2C地址的TOF传感器之间的冲突所必需的。...
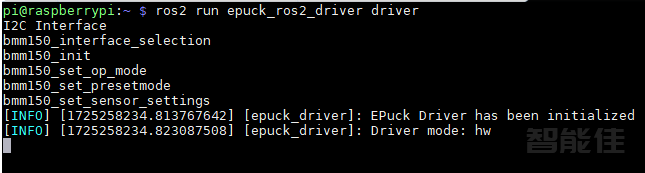
要启动机器人节点,请发出命令ros2 run epuck_ros2_driver driver您可以通过发出命令来获得所有主题的列表:ros2 topic list...
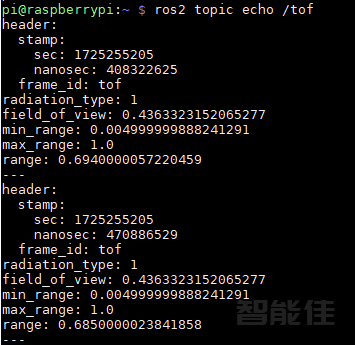
通过简单地显示主题发布的消息来从计算机测试与机器人的通信是否确实正常工作,例如:ros2 topic echo /tof您可以通过发出以下指令控制机器人: 机器人向前移动ros2 topic pub -1 /cmd_vel geometry_msgs/Twist "{linear:{x: 2.0, y: 0.0, z: 0.0}, angular:{x: 0.0, y: 0.0, z: 0.0}}" 停止运动ros2 topic pub...