ToddlerBot: 开源仿人机器人平台——低成本、高灵活性的AI学习与操作专家微信公众号文章链接跳转:https://mp.weixin.qq.com/s/6trQtVq4K8USg1XC-Fl6pAToddlerBot是一个开源的、与机器学习兼容的仿人机器人平台,旨在高效地在模拟环境和现实世界中收集大规模、高质量的训练数据。该平台由斯坦福大学的设计团队开发,具备30个自由度(DoFs),支持多种控制策略,如强化学习、模仿学习等,适用于广泛的研究和应用场景。产品亮点低成本...
2025-06-24 /
2754 次浏览 /
人形机器人
Orca Core 是 ORCA Hand 的核心控制包。它用于抽象硬件,提供校准和张紧脚本,并在关节空间中使用简单的高级控制方法来控制机械手。采购链接开始要开始使用 Orca Core,请按照以下步骤操作:下载代码:git clone https://ghfast.top/https://github.com/orcahand/orca_core.git 1.创建虚拟环境(推荐):python3 -m venv venvsource venv/bin/a...
2025-12-24 /
2105 次浏览 /
灵巧手
智能佳—Gello-UR机械臂遥操作—操作引导视频/* 仅针对本页面的局部样式,不影响全局 */
.product-video-container {
max-width: 100%;
margin: 20px 0;
background: #fff;
border-radius: 4px;
overflow: hidden;...
点击跳转项目地址:https://wuphilipp.github.io/gello_site/代码地址:https://github.com/wuphilipp/gello_software...
采购点击跳转:项目网站:https://jasonjzliu.com/factr/代码开源地址:https://github.com/JasonJZLiu/FACTR_Teleop...
interbotix机械臂功能包安装sudo apt install curlcurl 'https://raw.githubusercontent.com/Interbotix/interbotix_ros_manipulators/main/interbotix_ros_xsarms/install/amd64/xsarm_amd64_install.sh' > xsarm_amd64_install.shchmod +x xsarm_amd64_i...
USB连接整个机器人需要9个USB口,使用两个USB集线器进行此设置要将Tracer Base连接到笔记本电脑,请使用底座附带的USB-CAN总线转换器。机械手臂有4个USB1个连接移动底盘的USB1条里程计USB1个前置摄像头2个机械臂腕部相机将这两个USB集线器分别插入笔记本USB端增加相机机械臂USB配置文件查看USB串口号udevadm info --name=/dev/ttyUSB0 --attribute-walk | grep serial同理udevadm i...
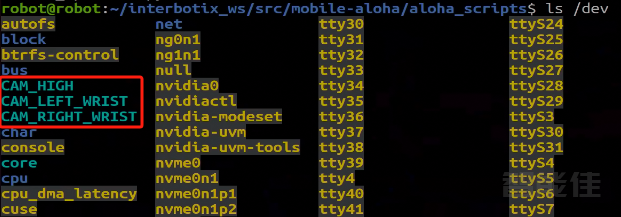
您可以在此处使用USB集线器,但每个集线器最多可使用2个摄像头,以实现合理的延迟。为了确保所有3个摄像头都绑定到一致的端口,需要类似的步骤。相机默认绑定到/dev/video{0, 1, 2...},而我们希望有符号链接{CAM_RIGHT_WRIST, CAM_LEFT_WRIST, CAM_HIGH}举CAM_RIGHT_WRIST个例子,假设它现在绑定到/dev/video0.运行udevadm info --name=/dev/video0 --attribute-w...
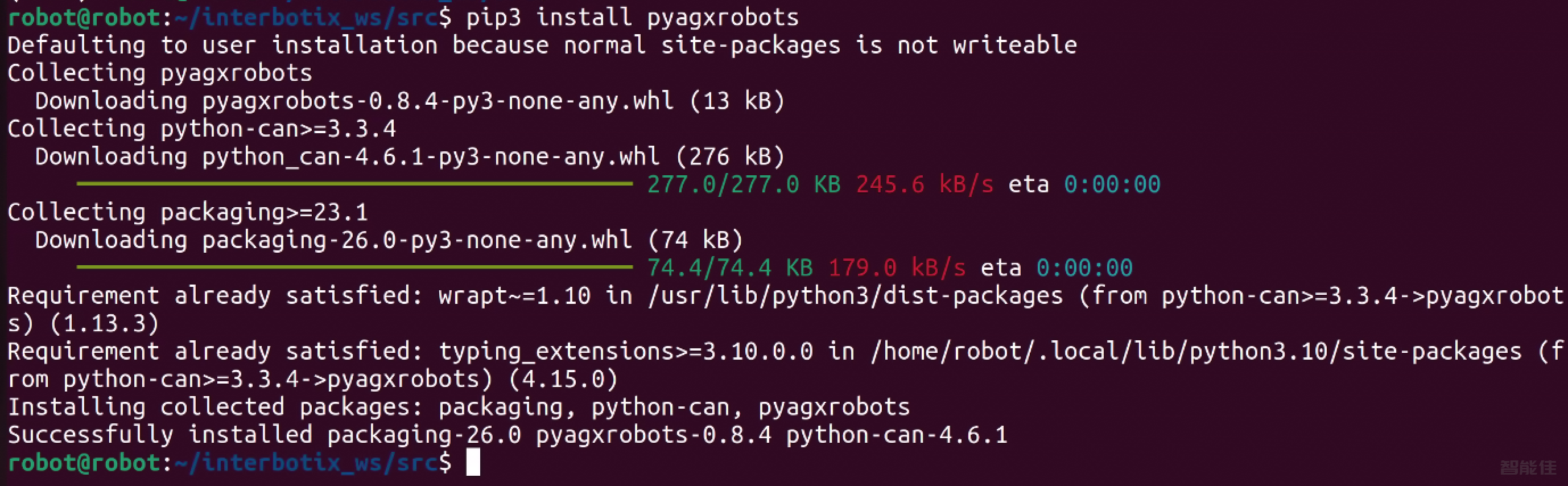
通过自带的CAN转USB线将底座连接至电脑,然后开机。从 AgileX 安装 SDKpip3 install pyagxrobots启用gs_usb内核模块sudo modprobe gs_usb调出 CAN 设备sudo ip link set can0 up type can bitrate 500000如果前面的步骤没有发生错误,您现在应该可以使用命令看到 can 设备ifconfig -a安装并使用can-utils测试硬件sudo apt install can-u...
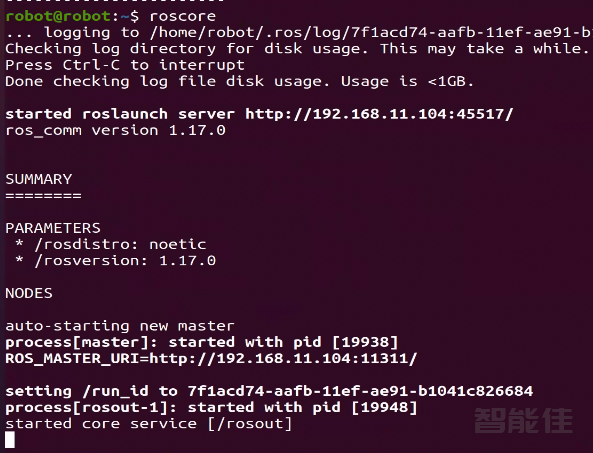
启动roscore打开终端,开启roscoreroscore 启动4个手臂roslaunch aloha 4arms_teleop.launch 再次开启一个终端,输入rqtrqt 选择Plugins--->Visualization ---->Image View再次选择,重复2次然后勾选相应相机话题 最终如图:...
前提:安装CAN,检查CAN总线是否连接正常,HUB是否开启参考旋开底盘旋钮,并软件输入以下内容,使能CAN总线cd /home/robot/interbotix_ws/src/mobile-aloha/aloha_scripts./enable_can.sh 启动底盘(底盘版本里程计)roslaunch tracer_bringup tracer_robot_base.launch查看话题,看是里程计否启动成功:rostopic listrostopic echo...
注意:在运行以下命令之前,请务必将所有4个机器人置于睡眠(sleep)位置,并打开主机器人的抓手。所有机器人都会上升到易于远程操作的高度。# Right hand terminal右手臂终端conda activate alohacd ~/interbotix_ws/src/mobile-aloha/aloha_scriptspython3 one_side_teleop.py right# Left hand terminal左手臂终端conda activate aloh...
快捷进入目录命令cmspython3 record_episodes.py --task_name <your task_name> --episode_idx 0任务配置可以在constants.py文件中的TASK_CONFIGS字典中找到。TASK_CONFIGS提供了一个模板任务aloha_wear_shoe,其中包含所有可能的字段和一些占位符值。在这里,我们将仅关注任务名称、数据集目录、剧集长度和相机名称。配置字段描述任务名称任务名称应准确描述...
conda activate alohapython3 visualize_episodes.py --dataset_dir ~/aloha_data/aloha_mobile_dummy --episode_idx 0 会生成如下内容:...
conda activate alohapython3 replay_episodes.py --dataset_dir ~/aloha_data/aloha_mobile_dummy --episode_idx 0 数据存放位置(根据自己情况调整)home/robot/data ...